ME 412 Heat Transfer Laboratory
Heating and cooling processes can be found everywhere, and, thus, a variety of systems are designed to meet the needs for thermal management. For this project, students are asked to focus their attention on the various ways to enhance cooling. Each team will conduct a review on different types of cooling systems, then on a specific cooling application of their interest. Each team will also design, build, analyze, and test a vortex tube, which is commonly used in industrial spot cooling. A Ranque-Hilsch vortex tube is a simple, compact, light mechanical device that separates a single inflow of compressed air into two outflows: one hot and one cold. The design objective is to maximize the temperature difference between the hot and cold streams. There are no restrictions on the dimensions of the tube, but the compressed air will operate at a fixed setting. On the testing day, compressed air will be provided. Temperatures of the hot and cold outflows will be measured. Each team will have 15 minutes to set up, demonstrate, and dissemble their vortex tube. In addition, they will also prepare a power-point slide show or video clip for the audience to explain their design decisions, analysis, and operations of their device.
ME 456 Mechatronic System Design
The learning objective of ME456 is for students to understand the entire process of developing a mechatronic system. This includes: a) system modeling, b) PID control, c) control implementation to the Arduino platform using Simulink, and d) experimental validation. The class will also help students understand the principles of commonly used mechatronic system hardware, such as rate gyro and accelerometer sensors, DC motor actuators, micro- controllers, etc., basic Simulink program development for Arduino compatible hardware, analyze system output performance, and tune PID controller to satisfy certain output performance in simulations and experiments.
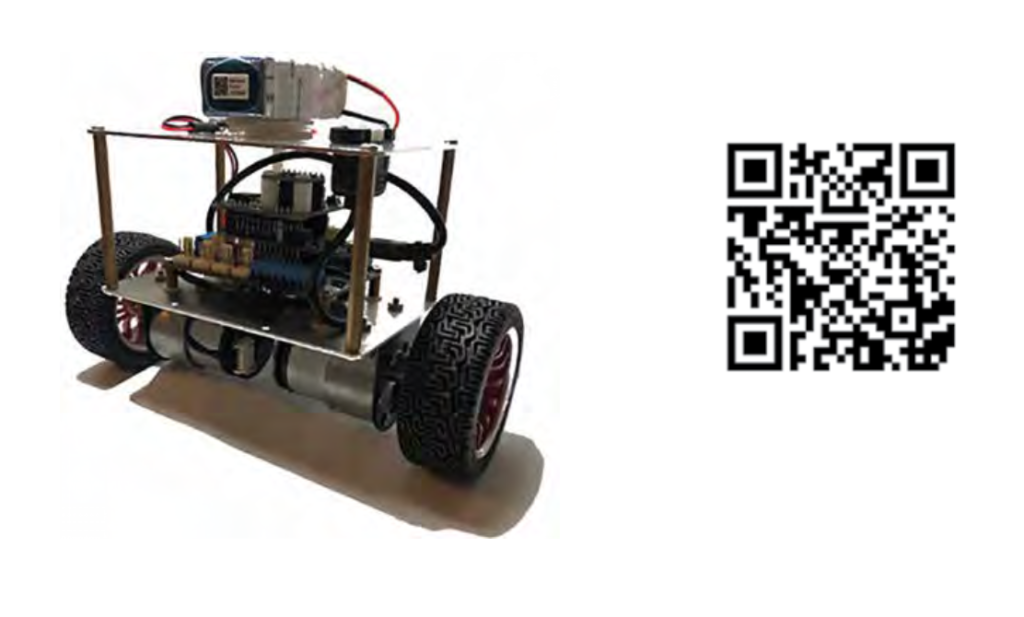
TheAn Arduino-based Mini Segway robotics (see figure) will be provided to each student who may use his/her
own laptop (with installed Matlab/Simulink and Arduino library developed by MSU) to interface with the Mini Segway through the Wi-Fi network. The Mini Segway is equipped with two geared DC motors and position (speed) feedback used to balance and drive the vehicle, and it is also equipped with gyro and accelerometer sensors to measure the Mini Segway angular position and velocity. Note that the gyro and accelerometer signals will be processed to generate Mini Segway pendulum angular position. Students will program the Arduino microcontroller in Simulink and compile the Simulink-based software into Arduino automatically. The only programming knowledge required for the class is Simulink that will be taught in Lab 1. For interested students, a GUI (graphic user interface) can be created in Simulink to be used to control the Mini Segway and tune the PID gain in real time. Please use this link (https://youtu.be/fa6hp2grxrk) or scan the QR code below for a Mini Segway demo.
ME 470 Mechanical Design & Manufacturing II
The goal in this project is to design a small scale three degree of freedom palletizing robot that collects and stacks items of cylindrical shape within a 2-minute time period. The teams will utilize mechanisms such as 4-bar linkages, gear sets, and cam- follower systems. Each team manufactured or utilized 3D printing to create the majority of their components. Performance will be measured by the total weight stacked divided by the total weight of the robot.
ME 478 Product Development
The objective is to develop an automated mixing and depositing system of an olive oil-sand mixture that can be adopted by a 3D printing machine based on a resin-powder (metal, ceramic) mixture.
The requirements of the system are: 1) The system should be capable of combining and homogeneously mixing a solution of 1:4 weight ratio of olive oil and sand (i.e., 5 grams of oil and 20 grams of sand); and 2) The olive oil mixed with sand should be deposited on a 10 x 10 cm platform in a weight controlled manner.
Presumably, the system might consist of: 1) A material supplying module. This module is capable of adding sand and extruding oil into the mixer with a specific weight ratio (this is very similar to what the binder jet 3D printer does); 2) A mixing module. Blending the oil and sand together until the solution is homogeneous; and 3) A deposition module. Depositing a certain
amount of the mixed solution (20 grams) onto a platform. Evaluation criteria: 1) The homogeneity of the solution will be inspected visually; and 2) The quality of the deposition will be based on the weight of each deposition.
If necessary, the electric motors must be controlled by MyRio, which will be provided. Starting from an individual project and progressing into a team project, each team must produce the machine through a series of design and manufacturing tasks. Each student needs to contribute individually as well as collaboratively to accomplish a series of tasks. CAD/CAM packages, CNC machining, rapid prototyping, testing, etc. will be used to produce the machine. Finally, a few teams will demonstrate their machines on Design Day. The details of the designed machine will be presented before Design Day.

ME 497 Biomechanical Design
The Biomechanical Design and New-Product Development course (ME 497/MKT 420) provides students with a unique opportunity to develop and market a real, new product that incorporates biomechanical function. Students work in inter-disciplinary teams of engineers and marketers and experience the entire process of new product development, from need identification, concept generation and testing, to product development, design analysis and launch. This course further strengthens students’ knowledge and real world exposure by working with Spartan Innovations. This year General Motors and the National Science Foundation (NSF) provided funds for device prototyping while Spartan Innovations provided our competition awards.