
Dr. Guoming Zhu
Professor
Department of Mechanical Engineering
Learning Objective:
The learning objective of ME456, Mechatronic System Design, is for students to understand the entire process of developing a mechatronic system. This includes: a) system modeling, b) PID control, c) control implementation to the Arduino platform using Simulink, and d) experimental validation. The class will also help students to understand the principles of commonly used mechatronic system hardware, such as rate gyro and accelerometer sensors, DC motor actuators, micro-controllers, etc., basic Simulink program development for Arduino compatible hardware, analyze system output performance, and tune PID controller to satisfy certain output performance in simulations and experiments.
Mechatronic System Used for the Lab Sessions:
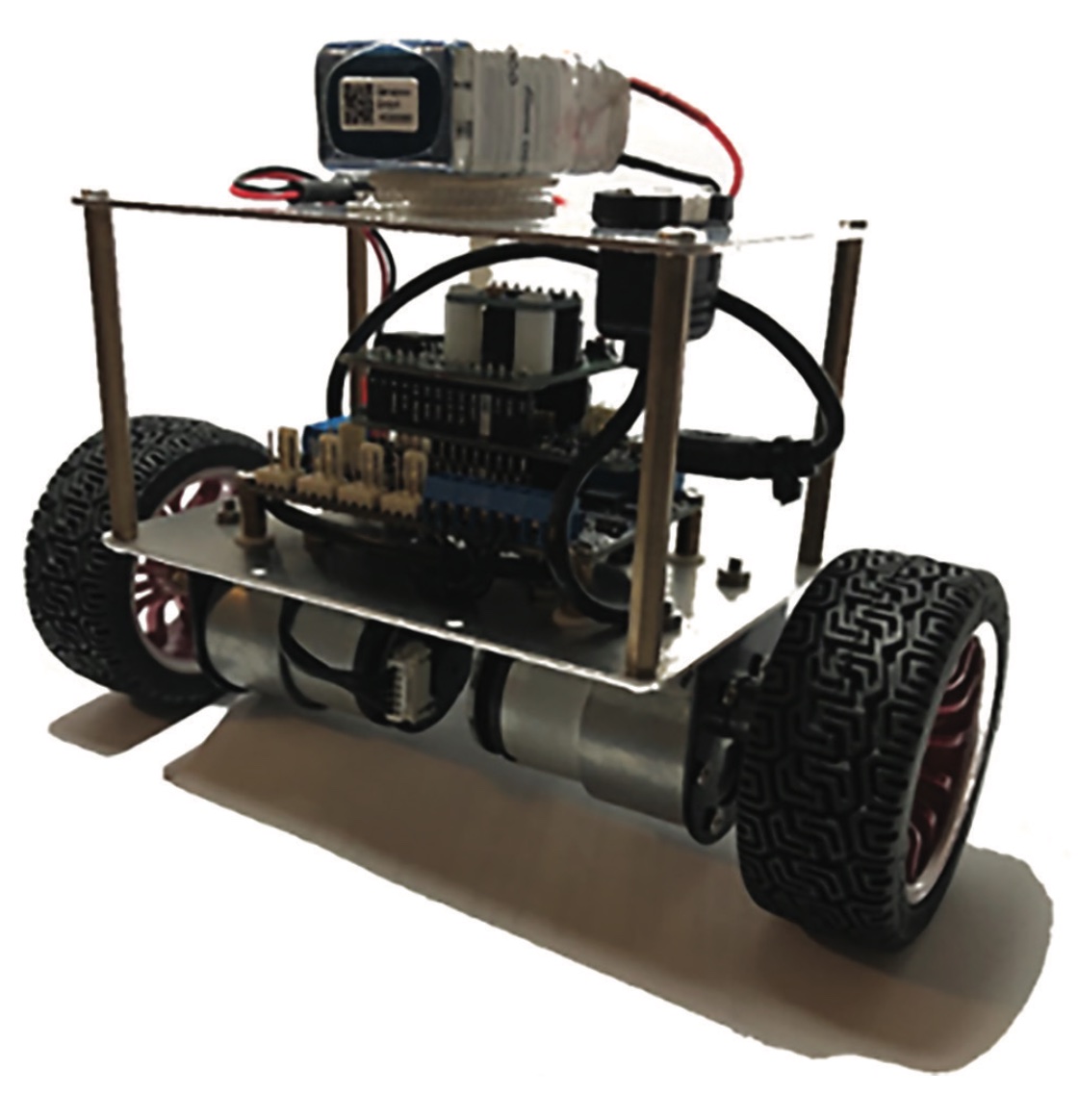
An Arduino-based Mini Segway robotics (see the left figure) will be provided to each student who may use his/her own laptop (with installed Matlab/Simulink and Arduino library developed by MSU) to interface with the Mini Segway through Wi-Fi network. The Mini Segway is equipped with two geared DC motors and position (speed) feedback used to balance and drive the vehicle, and it is also equipped with gyro and accelerometer sensors to measure the Mini Segway angular position and velocity. Note that the gyro and accelerometer signals will be processed to generate Mini Segway pendulum angular position. Students will program the Arduino microcontroller in Simulink and compile the Simulink-based software into Arduino automatically. The only programming knowledge required for the class is Simulink that will be taught in Lab 1. For interested students, a GUI (graphic user interface) can be created in Simulink to be used to control the Mini Segway and tune the PID gain in real-time. Please use this link (https://youtu.be/fa6hp2grxrk) or view the video below.