Electrical and Computer Engineering ECE 480 Senior Design is required of all electrical and computer engineering majors at MSU.
The following were the project sponsors and projects for Fall 2019:
MSU Solar Racing Team: BEV Level 2 On-Board Charging Module

The Michigan State University Solar Racing Team is a student-led organization that designs and builds full- sized solar electric vehicles. Beginning in Fall of 2017, the
team started designing a two-person solar car to compete in the cruiser class of the 2020 American Solar Challenge. A previous version of the vehicle went to competition this past summer as a practice run before the main competition. To prepare the car for the long-awaited American Solar Challenge, all multi- occupant style vehicles must be equipped with an On-Board Charging Module (OBCM) to allow the vehicle to charge its battery at US level 2 electric charging stations.
Our team was tasked with developing an effective architecture and working prototype OBCM that will allow charging of the battery pack on the team’s current car, Aurora. The module takes 240 AC voltage from a level 2 BEV (Battery-Electric Vehicle) charging station and converts it to the proper charging voltage and current to charge our pack. This feedback charging loop was designed using the Constant Current – Constant Voltage (CC-CV) method, intended for lithium ion batteries. Reliability, shock-resistance, optimal thermal cooling and power effifficiency were key benchmarks for the design. The success of this design will provide a path for continued development of the OBCM, eventually leading to the fabrication of a reliable and upgradable system for future generations of the Solar Racing Team.

MSU Facility for Rare Isotope Beams (FRIB): Wide Bandwidth Differential Oscilloscope Probe

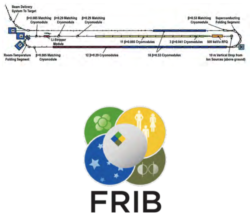
The Facility for Rare Isotope Beams (FRIB) at Michigan State University is a scientific user facility for the Office of Nuclear Physics in the U.S. Department of Energy Office of Science (DOE-SC). FRIB enables scientists to make discoveries about the properties of rare isotopes, nuclear astrophysics, fundamental interactions, and applications for society in order to support the mission of the Office of Nuclear Physics in DOE-SC. FRIB is the nation’s premier center for rare isotope research.
As a complex, interdisciplinary enterprise embarking on the exploration of the mysteries of nuclear structures and the cosmos and making discoveries for a better world, FRIB scientists utilize a wide variety of electronic devices and signals for testing. These devices may operate with very low amplitude signals (i.e. approaching the noise floor) at signal frequencies ranging from extremely low frequency to ultrahigh frequency radio waves and microwaves. In order for scientists to accurately monitor the behavior of these devices under testing, in use cases like noise spectrum analysis and monitoring of differential logic signals, FRIB requires a safe, high-performance differential oscilloscope probe.
Typical oscilloscope probes are single-ended probes which are vulnerable to common mode noise, have signal fidelity and measurement repeatability issues at higher frequencies and are difficult to use for ‘floating’ measurements. In order to overcome these challenges and meet the needs of FRIB scientists, our sponsors at FRIB tasked our team, with the design, building and characterization of a differential amplifier circuit for use as a differential oscilloscope probe which performs with a reasonably flat gain over a wide
bandwidth, high input impedance, relatively large differential input range, BNC connector output to interface to an oscilloscope and Electrostatic Discharge (ESD) protection system. While these types of probes are typically quite expensive (costing roughly $5000 USD), we aim to produce this probe for less than $500 USD.

With this probe, scientists at FRIB will be able to safely and
accurately monitor critical electronic
devices during their journey of discovery
and leadership.
In order to meet the functional requirements of our project, the probe will have multiple distinct subsections including an input probe tip, a buffer stage, a power-stabilization stage, Transient-voltage-suppressors (TVSs), and a differential circuit.

MSU Facility for Rare Isotope Beams (FRIB): Broadband GHz Microstrip Matching Network for Beam Diagnostic Test Stand
The Facility for Rare Isotope Beams (FRIB), funded by the DOE-SC, Michigan State University, and the state of Michigan, will assist scientists in making discoveries in nuclear physics. These discoveries will help scientists understand the properties of rare isotopes that are short-lived and not typically found on Earth. With a greater understanding of the properties of these rare isotopes, scientists will be able to apply this knowledge to applications in nuclear energy, society, medicine, homeland security, and industry.
Our team has been asked to work with FRIB at Michigan State University to design a microstrip matching network for the facility’s beam diagnostic test stand. The purpose of the facility’s test stand is to replicate the velocity and electromagnetic fields of a non-relativistic beam. The test stand needs to calibrate beam diagnostic devices for non-relativistic effects. The microstrip matching network that our team will be designing must be broadband to replicate the beam and match the helix impedance.
The City of St. Johns, Michigan: Detection of Buried Lead Water Pipes
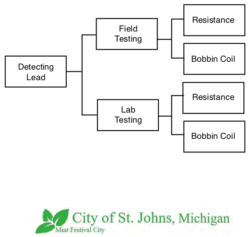
Following the recent lead contamination problems in Flint, the City of St. Johns aims to locate and remove all water service lines that contain lead and can possibly cause harm right now or in the near future. Due to insufficient record- keeping in the past, the materials of many service lines are unknown.
The team has been given the task of designing and implementing a solution to differentiate materials and detect lead in water service lines. The goal is to do this in a non-destructive way, without excavating the service lines. Multiple methods, such as measuring impedance or using a bobbin coil to create a magnetic field, will be tested in order to determine the most successful solution.

MSU RCPD/MSU Bikes: Intelligent Defense System (IDS)

In recent years, cycling has begun to be a better alternative for transportation due to the busy traffic and the air pollution in the cities. The number of distractions while driving an automobile has increased as well. As a result, every year the number of cyclist injuries and fatalities due to car collisions has increased.
Our team has been asked to help create a means of preventing cyclist injuries and fatalities due to vehicles on the road. The goal of the project is to design an affordable alert system which can detect the oncoming vehicles approaching from behind the cyclist. The team decided to use a camera to sense oncoming vehicles, alerting the cyclist and driver via a series of LEDs.
The sponsors and the team believe the low-cost, affordable intelligent defense system will prevent thousands of injuries and fatalities per year to cyclists.

Orphans International Helpline (OIH)/MSU RCPD
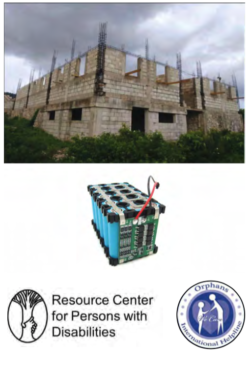
OIH (Orphans International Helpline), is a non-profit company that was created to help orphans in Haiti. It was founded in 2003, and since then they have provided shelter, medical care, clothing, food and education about Christianity for many children. Due to many natural disasters in the region, it is very difficult to maintain and control the basic needs such as electricity and water.
There is currently a hospital being built in Haiti through 100% donations, and the idea involves being self-sustainable in terms of energy. It will be powered by solar panels, wind turbines, generators, and will use lithium batteries to store the energy.
Our team has been challenged to design and build a Battery Management System, which can translate and store the power collected through different sources. Also the system needs to have the ability to detect, balance and manage the voltage of each battery and take appropriate action in different situations.
The result of this project needs to be very simple so that the people in Haiti are able to build the system themselves by following given instructions.
In order to meet the functional requirements of the project, the Battery Management System will be connected to the battery pack to charge and discharge voltage, show the battery status and different power sources to provide power to the hospital.

MSU ECE Smart MicroSystems Lab: Automated Winch System for Underwater Sampling

The Michigan State Smart MicroSystems Lab (SML) is dedicated to enabling smarter, smaller, and more integrated systems by merging advanced modeling, control, and design methodologies with novel materials and fabrication processes. The SML has authorized the Automated Winch System for Underwater Sampling project. The objective of this project is to develop a winch system that can lower sensors down to any desired underwater depth based on the feedback it receives from a pressure sensor. This work will set the foundation for the SML to eventually automate fish tracking and other underwater surveying.

Bottom Row (L-R): Parwesh Rallapalli, Adam Chapman, Paul Hanvey
MSU ECE Smart Microsystems Lab: Snake Robot for Inspection of Small Diameter Pipelines

Pipelines are designed to last a long time so that limited maintenance work must be done on them. Over time, however, constant use can begin to wear down pipes and create deformities in them that limit the amount of fluid that can travel through them. Detecting these errors in pipelines is tough, as it is hard to pinpoint the exact location of the defects and reasoning behind their placement. This leads to large amounts of work only to find a small deformity that could take much less time to fix.
Our team has been assigned the task of creating a pipeline inspection robot that can fit within four-inch diameter pipelines. It will be able to capture images of the inside of these small pipelines while personnel assess the deformities and find solutions to fixing them. A user can control the robot with a handheld controller and can make selective turns through complicated pipe systems. The focus is to design an easy-to- use, accurate robot that will assist greatly in saving time when fixing pipelines.
MSU ECE Robotics Lab: Robotic Crop Weeder

Weeds have been a problem in the agricultural industry as they negatively impact the growth of surrounding crops. These weeds occupy the crop’s surroundings and steal the nutrients that are a necessity in the growth and development of these crops. The overall effect is a decline in crop production which impacts not only the farmers, but also the consumer. The current solution of controlling the spread of weeds is through manual deweeding and using chemical products. The problem with this is that it can be tedious to the laborers, and the chemical products can cause damage to both the crops and the people that consume the crops.
Recently, the agricultural industry is implementing technology and autonomy as it helps decrease the manual labor and is a cost-effective solution. This year, our team is continuing to add on to the robotic crop weeder prototype that the previous two semesters’ teams have designed. The previous teams have been able to develop a robotic cart that can be manually driven, containing a robotic arm and camera, which allows the weeds to be detected and pulled. This year, our team is working with Dr. Tan to implement a z-axis manipulator to allow for more accurate deweeding as well as a torch to ensure the weeds do not come back after they have been eliminated.

MSU Offices of the Executive VP For Administration: Smart Hotel Cart System

Daily housekeeping service is standard in every hotel, but many of these services have key inefficiencies relating to the flow of information. One such example is in The Kellogg Conference Center and Hotel, where data regarding late arrivals, do not disturb, and cleaning status must be collected using multiple different systems by the front desk. Once at the front desk, cleaning instructions must be printed out on paper and handed to housekeeping personnel, and changes to this information are difficult to share effectively. Additionally, the staff must knock on a door to tell if a room is occupied and have no way of logging this information or sharing it with other personnel. Our team seeks to reduce these inefficiencies at The Kellogg Center with the development of a Smart Hotel Cart System. This system will use an electronic tablet as well as an occupancy sensor to streamline the flow of housekeeping information and provide real-time updates.

MSU Offices of Executive VP for Administration/Office fo the VP for Auxiliary Enterprise: Automation in the Dining Hall Dish Rooms
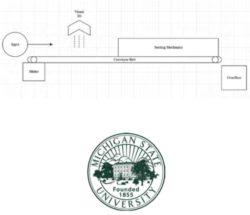
The Michigan State University dining hall dish rooms provide necessary functions to all on-campus MSU dining halls. Many of the tasks performed in the dish rooms are repetitive and time-consuming. The dish room staff have asked for help designing a process to increase productivity and speed of certain menial jobs.
Our team has been tasked with designing a system to process and sort dining hall utensils which will help increase efficiency while reducing the cost of manual labor. The focus for this system is to create a process which utilizes object recognition to detect silverware on a conveyor line, then sort the silverware into the proper storage units based on the type that was detected. The system will be designed to function in environments of high heat and humidity, while also having the capacity to operate for long periods of time.
For full functionality, the silverware must successfully pass through each phase of the above design. The key is proper visual recognition and timely removal of silverware from the belt into the appropriate bin.

CANVAS SOAR – AutoDrive Challenge: Data Logging and Diagnostic System
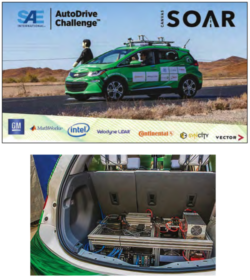
The AutoDrive Challenge is a collegiate level design competition created by General Motors and SAE International. As part of the competition, the MSU AutoDrive Team has been provided with a Chevrolet Bolt EV and is converting the vehicle into an SAE level 4 automated vehicle. This is an eight-university competition, and the team is currently in their third year. A key need the AutoDrive team has identified is an automated data logger and diagnosis system to give engineers insight into vehicle health and performance issues.

As a result of issues faced at the 2019 AutoDrive Competition, our team has been tasked with developing a low power, embedded computing system to log and analyze vehicle data. This data comes from the vehicle’s 10-gigabit ethernet, from the in-vehicle CAN bus, and from inertial sensors around the car.
Ultimately, the system will publish frequently monitored data streams to a web server and will provide the AutoDrive Team with an effective way to diagnose future issues.

CANVAS SOAR – AutoDrive Challenge: Sensor Synchronization
In 2018, SAE International and GM partnered together to sponsor the AutoDrive Challenge. The goal of the challenge is to produce a Level 4 autonomous vehicle by 2020. Level 4 indicates that the vehicle is able to operate on its own, even to the point of moving through urban areas. If a driver misses a warning, the vehicle will take the safest course of action, such as pulling over at the earliest opportunity. The vehicle currently has five lidar sensors and six cameras, which are being used for basic autonomous driving.
The team has been challenged with developing a method of synchronizing each lidar sensor and camera so that they do not interfere with each other during operation. Lidars operating out of sync can cause discrepancies in scanning and can provide difficulties in interpreting the data. For example, objects could appear multiple times in an image set or scanned area.
A printed circuit board and software package will be designed to meet the required specifications from the customer. The PCB will provide power to the numerous lidars on the vehicle and take data from multiple sensors. The software package will synchronize the timing signal sent to the sensors.

MSU CSANN Lab: Deep Neural Network-based Navigation Rovers for Sound/Video Classification

The deep neural network (DNN)-based methods are the dominant ways to solve image- and video-related classification and recognition. The DNN techniques are extensively applied in a variety of fields and subjects. Thinking and solving DNN engineering problems are becoming more and more popular. As long as big data can be collected and acquired, appropriately trained DNN modules accomplish classification fast and accurately.

Our team was tasked to implement the DNN modules on a proposed project. Two DNN modules will be applied on a human object recognition and hand gestures classification. Based on those, the picture will be taken and the background will be changed according to recognized hand gestures.

MSU Nondestructive Evaluation (NDE) Lab: Motorized, Waterproof X-Y Manipulator
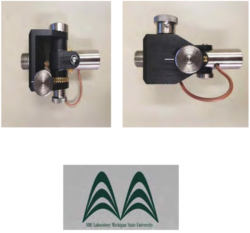
The MSU Nondestructive Evaluation (NDE) lab contributes to creating sensors and systems that allow them to monitor and evaluate the structural integrity of parts and components using multiple test methods. Currently, they are using ultrasonic evaluation to conduct inspections and take measurements underwater. A manual X-Y manipulator is being used at the moment, which is time-consuming when trying to find the optimal position for ultrasonic evaluation.
Our team has been tasked with creating a motorized, waterproof X-Y manipulator in order to automate the ultrasonic evaluation process by sweeping the test area in order to scan for the best signal. The main focus of this project is to be able to motorize the X-Y manipulator while still maintaining a small footprint.