Electrical and Computer Engineering ECE 480 Senior Design is required of all electrical and computer engineering majors at MSU.
The following were the project sponsors and projects for Spring 2020:
MSU Solar Racing Team: J1772 Charging Control Board
 The Michigan State University Solar Racing Team has been designing and racing cars competitively since their founding in 2000. Their first solar powered vehicle was built in 2010; subsequently they have produced five different models.
The Michigan State University Solar Racing Team has been designing and racing cars competitively since their founding in 2000. Their first solar powered vehicle was built in 2010; subsequently they have produced five different models.
The team is working on their current vehicle, Aurora, and they hope to compete in the Formula Sun Grand Prix later this year. This model is built for two people and uses an onboard charging module, which enables it to be charged at standard level two charging stations.
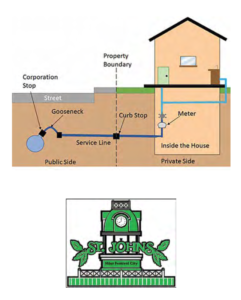
Our project is a continuation of the work of the Fall 2019 capstone team. It involves designing an interfacing circuit to monitor and control the charging device. Data are communicated among the Electric Vehicle Supply Equipment, the charger, the battery management system, and a power distribution board. A CAN, which is interfaced via a DB-9 Connector, is used to communicate between the charging station and the vehicle. The board to be created will be programmed on an Arduino Due with feedback from the CAN data.
The final product will enable a user to monitor the charging systems and allow them to adjust current output using potentiometers. To observe and control the charging module, diagnostic LED lights will be used to monitor the states and the monitored states will be displayed on an LED screen. A 12V external power supply will be included together with an emergency shut-off switch in the event of a malfunction.

Team Members (L-R): Xuan Zhao, Devin Palmer, Nick Sly, Itsuki Okamoto
![]()
Hillsdale Hospital: Lighting System for Horse and Buggy Injury Reduction
 Founded in 1915, Hillsdale Hospital is a community- based hospital, providing quality healthcare in the community.
Founded in 1915, Hillsdale Hospital is a community- based hospital, providing quality healthcare in the community.
Since then, Hillsdale Hospital has been committed to providing high-quality health care services, such as acute inpatient services, skilled nursing rehabilitation, state-of- the-art joint replacement and bariatric surgery, all with a personal, caring touch.
They have noticed that there is a significant need for improvement in lighting systems that are currently in place within the Amish community. With the interest of reducing injuries and properly integrating this lighting technology into the culture, the hospital chose to address this issue.
Our LED-Based Lighting System reduces the risk for injury by providing a horse and buggy system with proper lighting mechanisms. The system is a magnitude brighter than the current system in place. In addition, it allows a user to signal turns, signal braking, and employ headlights.
The headlights are powered by multi-D cell batteries. These batteries are recharged by a solar panel located on the buggy.
To ensure durability, the lights are encased and firmly installed on padded material. This allows for doubling of waterproofing and vibration proofing.
Modern engineering assessment, marketing analysis, and electrical engineering design have been used to provide safety augmentation to centuries old horse and buggy transportation.

Team Members (L-R): Nick Freda, Chris Nastoski, Michael Woodham, Xinxin Xiao, Elaine Nguyen, Jason Sargent
![]()
Texas Instruments: Radar Sensor & Camera Fusion for Autonomous Vehicles
 Autonomous vehicles depend on multiple sensors including cameras, lidars, radars and ultrasound for driving safely and optimally in a variety of weather and road conditions. Sensors have differing resolutions, accuracies, ranges, and behaviors, particularly under adverse weather conditions. As a result, sensor fusion will be of paramount importance for achieving level-4 autonomous all-weather driving.
Autonomous vehicles depend on multiple sensors including cameras, lidars, radars and ultrasound for driving safely and optimally in a variety of weather and road conditions. Sensors have differing resolutions, accuracies, ranges, and behaviors, particularly under adverse weather conditions. As a result, sensor fusion will be of paramount importance for achieving level-4 autonomous all-weather driving.
In this project, a system that combines the TI 77 GHz radar module (currently used in the automotive industry) with a camera for object recognition and identification was developed. While cameras are very accurate when detecting objects in clear conditions, radar can provide additional support in less optimal conditions.
Our project involves sensor synchronization, calibration, data-logging and detection-level fusion using radar and camera sensors to be used for autonomous driving. The system performance was evaluated under a variety of conditions and distances.

Team Members (L-R): Neeraj Pagel, Thomas Pavey, Whitley Huelskamp, Dakota Kuhn, Lucas Pucheta
![]()
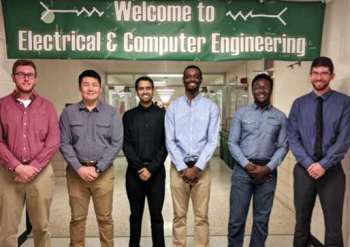
City of St. Johns: Characterization of Buried Water Service Line Materials
 Lead is a durable and malleable metal that was commonly used for water service lines in Michigan until the 1950’s. While lead’s properties have made it an optimal pipe material, it is not safe for human consumption or handling due to its toxicity. There is poor documentation regarding the usage and extent to which lead service lines were installed in homes. This makes it difficult to determine if a home has a lead service line in need of replacement without excavating. Presently, the only way of identifying pipe material is invasive and costly. The development of a non-invasive method to identify pipe material would allow a more efficient transition of infrastructure to safer materials.
Lead is a durable and malleable metal that was commonly used for water service lines in Michigan until the 1950’s. While lead’s properties have made it an optimal pipe material, it is not safe for human consumption or handling due to its toxicity. There is poor documentation regarding the usage and extent to which lead service lines were installed in homes. This makes it difficult to determine if a home has a lead service line in need of replacement without excavating. Presently, the only way of identifying pipe material is invasive and costly. The development of a non-invasive method to identify pipe material would allow a more efficient transition of infrastructure to safer materials.
Our project is to develop a non-invasive method of identifying different service line materials by building a self-contained, easy-to-use system capable of identifying the nature of the service line material. We will leverage the unique resistivity values of the service line materials in designing this device.
The principle on which the device would work involves applying a high current power source through the pipes and measuring the voltage across the pipe. Using Ohm’s law, we will then be able to calculate the resistance of the pipe and further determine the resistivity. The calculated resistivity will then help us determine the material that likely makes up the service line.
Team Members (L-R): Ashtyn Carvalho, Noor Ali, Terran Williams-Bowens, Marie-Irene Yayishimiye, Ewurama Owusu-Hammond, Emily Kulkis, Allyssa Sanderson, Claire Marquardt
![]()
MSU Office of the VP for Auxiliary Enterprises: Robotics in a Residence Hall Dish Room 2.0
 The Michigan State University Brody dining hall provides 1.6 million meals a year. The dining hall staff has made it their mission to provide a clean environment for students in order to reduce the risk of cross-contamination. The most important task of the dish room is to ensure that all the dining utensils are cleaned extensively to prevent illnesses caused by harmful bacteria.
The Michigan State University Brody dining hall provides 1.6 million meals a year. The dining hall staff has made it their mission to provide a clean environment for students in order to reduce the risk of cross-contamination. The most important task of the dish room is to ensure that all the dining utensils are cleaned extensively to prevent illnesses caused by harmful bacteria.
Our project is to improve the existing robot design of a system that processes and sorts dining hall utensils into their assigned bins. For this redesign we plan to implement a process that has the capability of capturing higher resolution images for the object recognition feature to detect silverware on the conveyer belt. With this redesign we are focused on decreasing the processing time for the recognition software and improving the productivity within the dish room.
Team Members (L-R): Nolan Carter, Arielle Tolbert, Jordan Claxton, Tia Smith, Isaiah Carter
![]()
MSU Department of Electrical & Computer
Engineering: Aerial Aggregate Analyzer

The long-term objective of the aerial aggregate analyzer project is to develop a system that will remotely inspect the quality and size of aggregate before it is used in road construction. To achieve this, our team will develop an arm and scoop that will attach to a drone capable of flying to aggregate sites in large quarries. This will help save time and resources, as well as ensure the safety of personnel working around large quarry machinery.
The robotic arm will have three main functions: (1) scoop, settle, and rotate aggregate, (2) capture high resolution images from multiple angles, and (3) send images to a laptop to construct a 3D model of the aggregate. It will be a two-link arm with a rotating scoop attached to the bottom as a third link. The total weight will be under 600g, which is within the payload capacity of a mid-sized quad/hex rotor.
The arm will be controlled via a laptop with graphical interface from a safe distance away (up to 1 mile). An onboard Raspberry Pi will control the servo motors, vibrational motors, and camera and will remotely communicate with the laptop using long-range XBee transceivers.
The final demonstration of the project will showcase the analysis of aggregate by using the designed arm attached to a table, images collected by the camera and transmitted to the remote laptop using the Raspberry Pi and XBee transceivers, and the reconstruction of aggregates using 3D Zephyr software.

Team Members (L-R): Anna De Biasi, Anna Schierlinger, Cory Hilton, Audrey Guest, Jacob Swaneck, Megan Henderson
![]()
Niowave Inc.: Improved Phase-locked Loop for Electron Accelerators
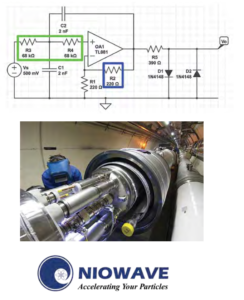 Niowave, Inc. located in Lansing, Michigan is a spinoff of Michigan State University dedicated to the production of radioisotopes through the use of high-power superconducting electron accelerators. Complementary to the exotic isotopes being studied at MSU’s Facility for Rare Isotope Beams, the medical isotopes being produced at Niowave include molybdenum-99, a precursor for a majority of the radioisotope studies being done in hospitals today, and new cancer-killing agents like the alpha-emitting actinium-225 (dubbed the “rarest drug in the world”).
Niowave, Inc. located in Lansing, Michigan is a spinoff of Michigan State University dedicated to the production of radioisotopes through the use of high-power superconducting electron accelerators. Complementary to the exotic isotopes being studied at MSU’s Facility for Rare Isotope Beams, the medical isotopes being produced at Niowave include molybdenum-99, a precursor for a majority of the radioisotope studies being done in hospitals today, and new cancer-killing agents like the alpha-emitting actinium-225 (dubbed the “rarest drug in the world”).
Electron beams are used to make x-rays which then split atoms in fuel rods or transmute targets by knocking out protons and neutrons. These high-power beams must be well controlled to prevent damage to the targets or to the accelerator, itself. One key system is the phase-locked loop (PLL), which aligns the frequency of all of the RF structures in the system to the superconducting niobium cavity. The intrinsic quality factor of the cavity is 109, and even when loaded down by the high- power beam, it remains 106.
Our project was to build a gain and filter block (loop filter) for the error signal in the PLL. This gain and filter block should be configurable for the different conditions under which the cavity is operated, and eventually should be capable of communicating via a digital channel to the programmable logic controller system. Specifications are that the block deliver an adjustable gain of 1 to 100 with a low-pass filter that has an adjustable cutoff frequency between 0.1 to 20 KHz.
Team Members (L-R): Sean Castle, TJ Nguyen, Indra Adhikari, Tim Drangines, Cobian Gleason, Jason Troppens
![]()
Bordrin: Sensor Calibration for an Automated Vehicle
 Bordrin is a smart electric vehicle company that has been working on advanced driver-assistance system (ADAS) and autonomous driving feature development. Their prototype vehicle is equipped with a smart front camera and a 360o lidar.
Bordrin is a smart electric vehicle company that has been working on advanced driver-assistance system (ADAS) and autonomous driving feature development. Their prototype vehicle is equipped with a smart front camera and a 360o lidar.
Our project is to develop a calibration method for the sensors in its perception system. Calibrating the lidar with the camera is important because both devices need to take precise data readings within a shared time period. When calibrated, these two devices will enable the ADAS to accurately identify the surroundings, regardless of certain factors, such as camera lens distortion. An uncalibrated system can create discrepancies, potentially leading to confusion in the ADAS.
An ADAS sensing system and corresponding software will be designed to meet the customer’s required specifications. This project consists of two parts. The first part is building a low-cost sensing and data collection system. This system will consist of an in-vehicle PC for data collection, a lidar sensor, and camera. An adjustable lidar/camera mount will be designed so that the two devices can read data from a similar perspective and can be moved around with ease.
The second part is developing an automated calibration method for the lidar and camera. Calibrating the lidar using stationary objects is the first step to developing a solution. After the lidar is calibrated, the camera can be calibrated by matching objects detected by the lidar, using OpenCV and other ROS software.
The two devices will be calibrated by comparing the angles of the lidar and camera, as well as the point where their perspectives intersect.
Team Members (L-R): Walter Lee, Kevin McMahon, Tom Cansfield, Troy Anderson, Andrew Kilponen, Drew Kapnick
![]()
Consumers Energy: Real-Time Power System Analysis
 To begin replacing coal power generation, Consumers Energy is preparing for an increase in Distributed Energy Resources (DER) penetration on its Low Voltage Distribution system. DER includes small scale energy technologies, such as solar gardens, that may connect to the transmission grid. Due to this transformation in the energy system, the best control methodology for the integration of new DER is unknown. To address this challenge, Consumers Energy is seeking a solar garden system analysis and a comparison between real-time digital power system simulators.
To begin replacing coal power generation, Consumers Energy is preparing for an increase in Distributed Energy Resources (DER) penetration on its Low Voltage Distribution system. DER includes small scale energy technologies, such as solar gardens, that may connect to the transmission grid. Due to this transformation in the energy system, the best control methodology for the integration of new DER is unknown. To address this challenge, Consumers Energy is seeking a solar garden system analysis and a comparison between real-time digital power system simulators.
The solar garden system chosen for analysis is the Kalamazoo solar garden. The Kalamazoo solar garden includes, but is not limited to, a PV panel array, a battery storage unit, and an inverter. Through software simulations of the Kalamazoo solar garden circuit, case studies, such as various weather conditions, load values, and fault types, are investigated under both transient and steady-state conditions. These studies provide Consumers Energy insight on how to manage and design DER.
The three leading manufacturers of real-time digital power system simulators—RTDS technologies, OPAL-RT technologies, and Typhoon HIL—are compared based on criteria that Consumers Energy will consider when deciding which simulator to purchase. For example, two factors of the criteria are the number of buses per rack and the simulator’s ability to communicate with Consumers Energy’s existing control system. This comparison provides Consumers Energy real-time digital power system simulator information to reference as needed.
Team Members (L-R): Emily Fluent, Ryan Champagne, Majeed Fardin, Shaun Fillwock, Quentin Hinshaw
![]()
MSU RCPD/MSU Bikes: Intelligent Defense System (IDS)
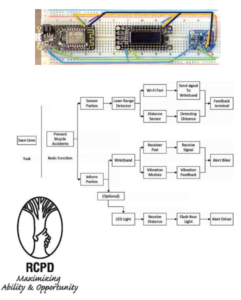 Due to the increasing number of people distracted by their cellphone use while walking or driving, the safety of cyclists is severely threatened. Our project is to develop a lightweight, portable and simple system that can alert cyclists to impending danger.
Due to the increasing number of people distracted by their cellphone use while walking or driving, the safety of cyclists is severely threatened. Our project is to develop a lightweight, portable and simple system that can alert cyclists to impending danger.
There are several systems that have been implemented, including radar and camera detection. Neither of these systems is optimal. Radar detection is expensive, and the reaction time using camera detection is slow.
We plan to create a distance sensor, which uses light that reflects the area around a bike. The system is lightweight, portable and inexpensive, making it a better alternative. A WiFi module will be used to transmit the signal. It will have a microcontroller for processing data and sending a signal to a band mounted on the bike. The band then vibrates, warning the cyclist of potential danger. The use of WiFi allows the system to be hands-free as well.
Team Members (L-R): Yuanhui Zeng, Boshi Feng, Yue Gu, Ruhao Chen, Taozhan Zhang, Yongqian Gao
![]()
Orphans International Helpline/MSU RCPD: Energy Harvesting Active Battery Balance System
 Founded in 2003, Orphans International Helpline (OIH) is a non-profit company created to help orphans in Haiti. They provide shelter, medical care, clothing, food, and Christian education for many children. Due to many natural disasters in the region and lack of domestic and foreign investment, it is very difficult to maintain and control the basic needs such as electricity and water.
Founded in 2003, Orphans International Helpline (OIH) is a non-profit company created to help orphans in Haiti. They provide shelter, medical care, clothing, food, and Christian education for many children. Due to many natural disasters in the region and lack of domestic and foreign investment, it is very difficult to maintain and control the basic needs such as electricity and water.
Currently a hospital is being built in Haiti, which is entirely funded by donations and will be self-sufficient in terms of its energy consumption. It will be powered by solar panels, wind turbines, and generators, and will use lithium batteries to store energy.
Our project is to design and build an active battery management system that can collect and store the power from each source. Also, the system needs to be able to detect and manage the voltage of each cell individually to ensure that no cell is strained more than any other during charge and discharge.
The system needs to be designed such that the people in Haiti can build the system themselves by following given instructions.
In order to meet the functional requirements of the project, the active battery management system will monitor the voltage of each cell and control power flow based on the relative strength of each cell during charge and discharge to increase battery health and efficiency.
Team Members (L-R): Jack O’Boyle, Alexis Haselwanter, Kyle Jones, Alexander Koenig, Mark Lapinski
![]()
MSU ECE Smart Microsystems Lab: Underwater Sensor Hub

Exploration of the bottom of lakes, oceans, and other bodies of water is a growing research field. The Smart Microsystems Lab at Michigan State University has taken great interdisciplinary strides toward understanding their surroundings. Accordingly, many sensory modalities are employed to collect various types of data on the body of water, such as depth, temperature, and current velocity.
Our project is to create and update previous components of an underwater sensor hub capable of collecting data on depth, pressure, and from preexisting fish acoustic tags. The hub is designed to be compact, waterproof, and able to withstand water pressure at a depth of 30m. The hub data collection and power level inside should be able to communicate with an onboard receiver via a protected ethernet cable and a Raspberry Pi. The entire sensor hub is able to come apart to allow access into the sensor hub for periodic inspection and servicing. An automated winch system has also been updated to better deploy and store the underwater sensor hub. The purpose is to design an effective and easy-to-use sensor hub that can accurately collect the desired data for the Smart Microsystems Lab research.
Team Members (L-R): Justin Carbary (ME), Ethan Schrader (ME), Jacob Ortmann, Xinyang Yu, Jingyi Shen, Eric Song
![]()
General Motors: Sound Emission for Hybrid/Electric Vehicles
 Hybrid/Electric Vehicles are extremely quiet due to the lack of an internal combustion engine. This can cause a safety hazard for pedestrians because the vehicle is too quiet to alert them. This hazard has prompted the government to enact safety regulations for these vehicles. This regulation has required Electric Vehicles to emit an artificial sound to alert pedestrians of the vehicle’s presence.
Hybrid/Electric Vehicles are extremely quiet due to the lack of an internal combustion engine. This can cause a safety hazard for pedestrians because the vehicle is too quiet to alert them. This hazard has prompted the government to enact safety regulations for these vehicles. This regulation has required Electric Vehicles to emit an artificial sound to alert pedestrians of the vehicle’s presence.
Our project is to create the sound generating system and the integration of the system into the vehicle. The safety requirements of this system mandate that there must be a certain sound intensity at various distances around the vehicle. We approached this problem by creating a transducer to push the desired sound through waveguides to the outside of the vehicle to alert pedestrians.
Team Members (L-R): Jason Smith, Zijing Wu (ME), Scott Anthony (ME), Tianyu Han (ME), Anthony Bassett, Nicholas Wilson, James Haven
![]()
MSU Human Augmentation Technologies Lab: Wearable Interpersonal Monitor for Enhanced Teamwork
 Have you ever had to work in a team that left you frustrated? Ever struggled to cooperate and had no idea how to improve? Imagine a world where there was a device that improved teamwork. Effective team interactions could be enhanced by making team members aware of their emotions, intentions, and methods of communicating.
Have you ever had to work in a team that left you frustrated? Ever struggled to cooperate and had no idea how to improve? Imagine a world where there was a device that improved teamwork. Effective team interactions could be enhanced by making team members aware of their emotions, intentions, and methods of communicating.
Much of today’s technology is focused on individualized products that have a side-effect of isolating their users from the real world. With Teamwork Enhancing Accessory, Modernizing Communication and Accelerating Productivity (TEAM CAP), we are hoping to change this reality and create a gadget that can enhance our interpersonal relationships.
We will achieve this by monitoring non-verbal channels of communication between team members and analyzing their patterns of behavior. In the workplace, people interact with each other throughout the day using both verbal and non-verbal communication. Non-verbal communication refers to all aspects of communication that do not make use of words. This includes gestures, body language, the distance between individuals, and voice intonation.
Most of our communication is non-verbal and people engage in behavioral communication whether consciously or unconsciously. In essence, the way individuals deliver non-verbal messages is just as important as verbal dialogue. Extraction and analysis of these non-verbal cues can help enhance team cohesiveness and interpersonal relationships by drawing awareness to their behaviors.
Our goal is to produce a wearable device that is capable of monitoring dialogue functions of position, attention and speech factors from multiple person interactions in real time.
Team Members (L-R): Sriram Motheram, Varun Venkatrao, Sidney Schrand, Toby Wang