Electrical Engineering
Projects
Electrical and Computer Engineering ECE 480 Senior Design is required of all electrical and computer engineering majors at MSU.
The following were the project sponsors and projects for Fall 2018:
Michigan State University Solar Racing Team: Brushless DC Motor Controller
The Michigan State University Solar Racing Team is a student led organization focused on the design and construction of solar powered electric vehicles. The team participates in annual competitions against universities from across North America in a circuit track format, as well as a biannual long distance road race, which, this past summer, traveled from Omaha, Nebraska to Bend, Oregon.
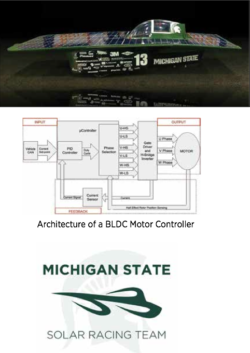
The current solar vehicle is one-wheel drive, requiring only a single motor controller. The team is looking to advance to a two-wheel drive system in the next vehicle, requiring two motor controllers. The motor controller in use is a Tritium Wavesculptor 22, at a retail price of $4,500, making the desired two-wheel drive upgrade costly.
Our team was tasked with designing a motor controller to replace the Tritium Wavesculptor 22 for a fraction of the cost, saving the Solar Racing Team a significant amount of money and creating a base of knowledge for future development. This controller will have a power rating of 7.5kW with passive thermal management, utilize hall effect rotor position sensing, and be compatible with the existing vehicle CAN. Additionally, our team would like to provide a design that is easily reparable and upgradable for future generations of the Solar Racing Team.


MSU D-Cypher Lab: Robotic Crop Weeder

Farmers are the backbone of great nations, supplying food for the masses seamlessly. Specifically, corn is a staple that is heavily relied on by consumers, especially in the United States, where there are 96 million acres of land preserved for its specific cultivation, establishing the US as the largest producer of the crop.
In the modern world, agricultural developers are not often considered when it comes to technological innovation, regardless of the magnitude of their problems. Citizens wake up in the morning expecting sustenance conveniently, without ever considering the labor that is required to produce such products. In the case of corn farming, particularly in the early stages of its development (within the first 6 weeks to 8 weeks of growth) it is heavily susceptible to invasive weeds stealing nutrients and resulting in a lower yield by a factor of 1% to 15%.
Our team has been tasked with finding an ergonomic solution for the removal of weeds within the most vulnerable period of a corn plant’s adolescence. Utilizing the PhantomX Reactor, a remotely controllable robotic arm, and a vision system, the design must be capable of locating, gripping, delivering force, and fully removing weeds from the soil near the base of corn. The prototype must also be maneuverable, maintain a minimum of 30 minutes of battery life, and not interfere with the production process, while also having the possibility for upgrades (such as full autonomy, weed pattern detection, and a motorized cart) once the design is passed off. Through this proposed design, farmers can expect higher yields at a lesser cost, with the potential of this design branching out to other crop varieties.

Facility for Rare Isotope Beams (FRIB): Development & Characterization of LNA Stage for Beam Current Measurement
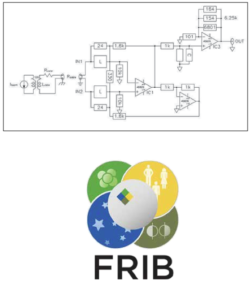
The Facility for Rare Isotope Beams (FRIB) currently uses a commercial beam monitor system which they would like to optimize for lower noise density during measurements. The goal is to reduce the noise in the output around the 1Hz- 100Hz range.
In order to accomplish this, our team will modify the amplifier and feedback circuit, as well as utilize an Arduino for digital noise reduction. These will serve as a proof-of-concept to the customer and will be further developed with the idea of a Field Programmable Gate Array (FPGA) in mind.

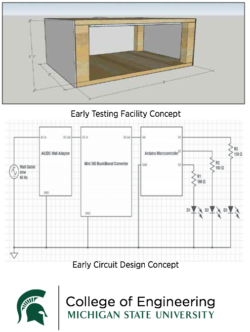
NASA/Arizona State University: Neutral Flux Detector
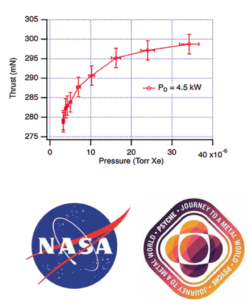
Psyche is the name of an asteroid made of mostly nickel- iron metal currently orbiting the sun; the asteroid is located between Mars and Jupiter. Psyche is also the name of the NASA mission to send an unmanned spacecraft to orbit the asteroid, which is scheduled to launch in 2022.
The Psyche spacecraft utilizes hall-effect thrusters for high efficiency, low thrust propulsion. There is an observable increase of background pressure in NASA facilities during testing of the hall-effect thrusters. This background pressure causes an increase in efficiency of the thruster, destroying the integrity and accuracy of any tests conducted. Some theories proposed to explain this phenomenon include ion re-ingestion and molecule re-ionization.
Our team is tasked with providing a sensor capable of measuring the flux of neutrals present within testing facilities. The purpose of the sensor is to provide NASA researchers with data to help extrapolate theories to explain the cause of increased background pressure.
CANVAS SOAR – AutoDrive Challenge: Ride Quality Monitor
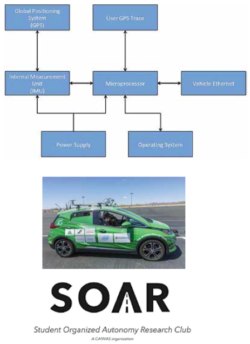
SOAR is a student-organized research organization focused on building a highly autonomous Chevrolet Bolt capable of traversing an urban scenario as part of the three-year SAE/GM AutoDrive Challenge Competition. The AutoDrive Challenge consists of both static and dynamic competitions focusing on a range of topics including societal impacts, engineering robustness and driving ability of the vehicle.
In preparation for the AutoDrive Challenge, our team is tasked with creating a ride quality monitoring device to aid in autonomous vehicle development. During the AutoDrive Challenge, the team is scored based on the ability of the vehicle to provide a quality ride. Ride quality is a measure of driving smoothness and how well the vehicle stays within designated lanes, trajectories, and speed limits.
The goal of this project is to develop a portable device capable of tracking vehicle dynamics during testing, while also tracking the location of the vehicle with respect to a predefined vehicle path. The team aims to provide an interface for this test data so ride quality can be quickly assessed. The team is also tasked with providing a composite score based on the AutoDrive Challenge scoring metrics.
MSU Nondestructive Evaluation Lab (NDE): Measuring Relative Viscosity of Automotive Engine Oil Using Ultrasonics
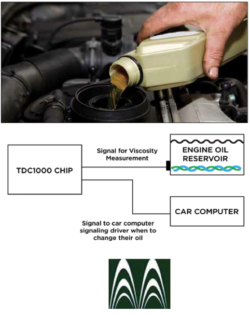
There is much debate by mechanics in the automotive world as to how often one’s engine oil should be changed in their automobile. Some say it depends on the size of the vehicle, mileage, driving habits, and other variables. Instead of guessing when one should change their oil, if the viscosity of the oil is measured in real-time or using a waveguide, then the oil condition can be assessed directly. This measurement can also be simplified by using a relative viscosity measurement tool which will compare the viscosity of used oil with fresh oil.
In an attempt to clarify when one should change their oil and to reduce wasted oil, our team was tasked with designing a setup that utilizes ultrasonics via the TDC1000 chip in order to measure engine oil viscosity in real time. Eventually this tool, which can be installed in the automobile, will tell the driver when to change their oil based on oil quality instead of mileage.

Aptiv: Advanced Study of Antenna Coverage for Implementing Next Fen V2X Technology in Commercial Vehicles

Aptiv is a global technology company that develops safer, greener and more connected solutions enabling the future of mobility. Aptiv’s vision is to develop and implement the next generation of active safety, autonomous vehicles and smart cities by using its hardware and software capabilities.
As a part of Aptiv’s vision of a more connected future, our team was tasked with the testing and implementation of V2X technology which includes vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication. These communications are enabled via wireless links using Dedicated Short-Range Communication (DSRC) protocol.
The project involved using Aptiv-developed V2X Gen2 hardware modules to perform extensive research on the DSRC RF signal coverage around a 26-foot truck and real-time 360-degree signal measurements as well as several distance measuring techniques. This measurement procedure is part of special use-case in commercial vehicles known as Cooperative Adaptive Cruise Control or “Platooning,” which promises increased fuel efficiency management for heavy truck fleets.
After performing the required testing, our team is responsible for data analysis on antenna coverage of the DSRC signal around the truck.
MSU CSANN LAB: Deep Neural Networks for Image/Data/Video Recognition and Classification

Integration of sensors with quick decision on-the-fly leads to many appealing applications in new generation embedded devices and systems. Example applications are in image/ video recognition, identification, tagging, navigations, etc. Simply, such devices would assist the user with instant essential information from staggering images and/or data. Successful and streamlined designs of deep neural networks have demonstrated appealing capabilities, in particular, image recognition and classification.
Powerful capabilities can be tailored for the available processing resources or onto embedded low-power co- processing Field Programmable Gate Arrays (FPGAs). This would provide local capabilities for the smart device/phones – off the cloud – with added benefits of speedups and device security.
The final project will include demos of the accuracy performance in recognition and classification of the device- captured images and/or sounds. Our team’s project outcomes will be judged on their ability to satisfy several competing performance metrics: classification and accuracy performance, execution speed and added power consumption expense.

MSU Electrical Engineering Department: Mobile Robot Companion for Selfies

Demographic reports indicate that the population of older adults is growing significantly around the world and, in particular, in developed nations. Consequently, there are a noticeable number of demands for certain services such as health-care systems and assistive medical robots and devices. With emerging technology, robots are going to eventually fulfill the role of our companions, and provide important services for us, including care for the elderly and disabled.
Our team was tasked with designing a way to integrate a mobilized robot companion that follows a person throughout everyday activities while capturing photos and videos whenever requested to do so. The goal of the project is to utilize a robot with integrating sensors and a Raspberry Pi with an enhanced camera and LIDAR, which utilizes light and radar to detect movements while avoiding certain obstacles.
The Turtlebot3 provides the necessary specifications and components to assist us with accomplishing this project. With its open source capabilities, the team can integrate a ROS (Robot Operating System) to simplify the task of creating complex and robust robot behavior across a wide variety of robotic platforms.

MSU Electrical Engineering Department: Smart LED Lighting
Residential lighting accounts for about 10% of all residential electric energy consumption in the US, or about 130 billion kWh per year. With modern LED lighting, it is possible to control this consumption by intelligently eliminating the illumination of areas not in use. This is currently done by sensing when a room is in use and turning off illumination when nobody is occupying the room.
Our team was tasked with a duel-phase project. Phase one is to design an illumination system that only lights a portion of a room. The system must be controlled using a touchpad to move the illuminated spot and have the ability to control the size of the illuminated region.
Phase two is then to add a system of sensors that must locate a person within the room and move the illuminated spot to that person. As the person moves, the illumination spot will broaden and move in front of them.

MSU Bikes Service Center/RCPD: Bicycle Collision and Blind-spot Detector
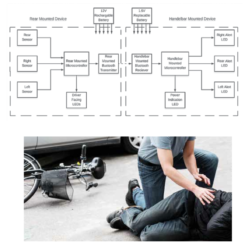
In 2015 in the United States over 1,000 bicyclists died, and there were almost 467,000 bicycle-related injuries. Of these collisions, 43% were the fault of the cyclist.
Our team was given the task of designing a device to help reduce that 43%. The goal of the project is to alert the cyclist to when collisions are imminent and when there is a vehicle in the cyclist’s blind-spots.
Utilizing microcontrollers and radar technology, we plan to have a pair of devices to detect and alert the cyclist: one rear-mounted device, and one handlebar-mounted device, used concurrently to detect vehicle position, direction and speed. This data will be implemented into our software to alert cyclists to the possibility of collisions.
MSU ECE Department: Underwater Wireless Communication Sensor for Temperature
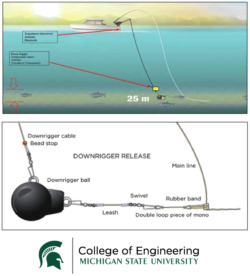
The goal of the project is for a temperature sensor to be able to wirelessly communicate through the water to a receiver that displays the temperature digitally. A system will be created to lessen the burden of changing out wired components on a downrigger.
The sensor system will be attached to the downrigger weight and covered in epoxy in order to be waterproof. The problem involved is sending the signal. This is difficult because the water will be conductive, so high-frequency signals cannot be sent.
Our solution is to use Sonar or ELF waves to send the information to the receiver attached to the bottom of the boat. This will, in turn, have a display attached to indicate the temperature onboard.
The sensor system will be composed of the temperature sensor (a thermocouple, an RTD sensor or a generic temperature sensor) and a device to transmit the signal (either a Sonar signal with the temperature information encoded on it or an ELF wave).
The second system will be a receiver which will decode the information and display it. This will be composed of a receiver/transducer, an Arduino or a Raspberry Pi.
Instrumented Sensor Technology. Inc.: Wireless Accelerometer
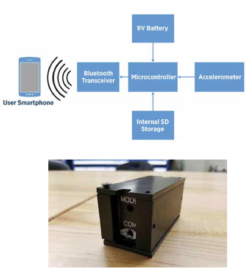
Instrumented Sensor Technology, Inc. offers a data recording device called the SnapShock-PLUS accelerometer that records peak acceleration, including impact, vibration, and shock, over the X,Y and Z axis. The current product requires a wired connection to remove the data from the device and onto a PC.
Our team has been tasked with recreating the acceleration recorder to measure peak g-levels but with the ability to wirelessly transmit its data to a smartphone application. This smartphone application will also be created by our team to allow the user to program recording parameters for the device to follow and to display the data from the recorder on the smartphone.
The device will utilize a Bluetooth transceiver to transfer the data from the accelerometer to the smartphone. All data will be internally stored to prevent data loss. The entire device will be powered by a 9V battery.
MSU Recycling: Tracking and Monitoring Trash Bins

There are over 200 green MSU recycling bins permanently scattered around campus and up to 400 additional bins are put in place during events. Currently, bins are monitored manually to determine whether they need to be emptied. Due to the uncertainly, this is an inefficient way to map trash collection routes.
MSU Recycling desires a method to determine the fullness of a bin in order to maximize route efficiency while minimizing their operating costs. The goal is to create an environment where bins are emptied before they become unpleasant for the general public.
Our team was tasked to create a system that will sense the fullness of the bin, communicate its current state to MSU Recycling and integrate the collected data into the existing system. Therefore, MSU Recycling will have the ability to create trash collection routes that will reflect only those bins that need to be emptied.