Electrical Engineering
Projects
Electrical and Computer Engineering ECE 480 Senior Design is required of all electrical and computer engineering majors at MSU.
The following were the project sponsors and projects for Fall 2017:
Union Pacific: Electricity Generation from Hot Rails
 Union Pacific operates over 32,000 miles of track across North America and is a leader in transportation. They cover 23 states in the western two-thirds of the United States.
Union Pacific operates over 32,000 miles of track across North America and is a leader in transportation. They cover 23 states in the western two-thirds of the United States.
Typically, the temperature of the rails will exceed ambient temperature by 30-60 degrees, with energy stored as waste heat. Union Pacific wishes to utilize the wasted heat stored on the tracks and convert it into electrical power that can be stored for later use. With thermoelectric generation technology evolving, this wasted heat can efficiently be converted to usable energy with little cost to the company after installation.
The team was tasked with designing a way to harvest the thermal energy and convert it to usable power. The goal of the project is to utilize a Thermoelectric Generator (TEG) chip to convert enough thermal energy into DC electrical energy and be able to boost the voltage output to charge a battery load nearby. Our prototype must be capable of attaching to the side of the rail without interfering with oncoming trains.

Team Members (L-R): Jon Klapatch, Alex Potoniec, Sam Gasiorowski, Yifan Zhang, Xizhou Xiang
![]()
Union Pacific: Regenerative Railcar Braking
Union Pacific is the largest freight hauling railroad system in the United States with over 32,000 miles of track and over 8,500 locomotives. The company extensively uses diesel electric locomotives to haul freight cars over thousands of miles.
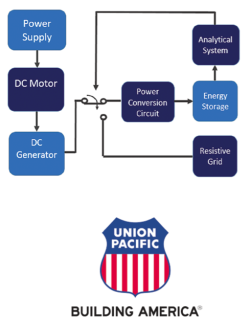 Union Pacific’s objective is to capture the wasted energy from rheostatic braking into either super capacitors or battery banks and eventually transfer the power back onto the grid. Our team is tasked with designing a small- scale regenerative braking system to capture the power being generated from a DC generator when braking. The system will contain a small DC generator, power conversion circuit, method of storage, and data analysis software that will harness the lost energy from braking. The software will be able to demonstrate the overall efficiency of the system as well as useful quantitative measurements. The information gathered from the model can be scaled up to the size of the braking system on the EMD SD-70M to determine the potential power that can be generated from its massive traction motors. A theoretical model will be developed to show how the small-scale model can be scaled up to the locomotive.
Union Pacific’s objective is to capture the wasted energy from rheostatic braking into either super capacitors or battery banks and eventually transfer the power back onto the grid. Our team is tasked with designing a small- scale regenerative braking system to capture the power being generated from a DC generator when braking. The system will contain a small DC generator, power conversion circuit, method of storage, and data analysis software that will harness the lost energy from braking. The software will be able to demonstrate the overall efficiency of the system as well as useful quantitative measurements. The information gathered from the model can be scaled up to the size of the braking system on the EMD SD-70M to determine the potential power that can be generated from its massive traction motors. A theoretical model will be developed to show how the small-scale model can be scaled up to the locomotive.
The combination of the small-scale model and the theoretical model will provide Union Pacific with information that is useful for future implementations of regenerative braking on its locomotives. Union Pacific can potentially use the stored power as a source of revenue by transferring it onto the grid or using it to reduce demand needed from the diesel engine.

Team Members (L-R): Lucas Wolfe, Zach Shannon, Zach Bates, James Staley, Josh Clouse
![]()
Continental AG: Advanced Driver Assistance Systems
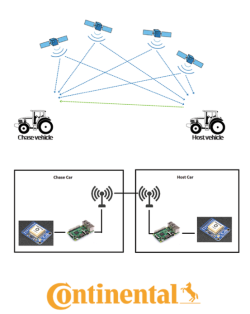 Continental AG currently uses a Differential GPS system for testing their autonomous vehicles. This system is very expensive and has limited range due to a stationary base. They see the potential for saving hundreds of thousands of dollars by engineering a cheap and accurate DGPS system for relative positioning of autonomous vehicles testing. By using DGPS concepts, we aimed to create a relative DGPS system which would calculate the distance between two cars in real-time by sending GPS coordinates from a host vehicle to a chase vehicle.
Continental AG currently uses a Differential GPS system for testing their autonomous vehicles. This system is very expensive and has limited range due to a stationary base. They see the potential for saving hundreds of thousands of dollars by engineering a cheap and accurate DGPS system for relative positioning of autonomous vehicles testing. By using DGPS concepts, we aimed to create a relative DGPS system which would calculate the distance between two cars in real-time by sending GPS coordinates from a host vehicle to a chase vehicle.
Our team devised a system using GPS modules, XBee communication, and Raspberry Pi microprocessors to implement the relative DGPS system. The goal of this design is to calculate the distance between the vehicles within +/-10 cm accuracy with a 100 ms loop time, as well as data storage for playback on Continental’s software at a later time.
A GUI interface was also implemented into the design by connecting a display in the chase car for real- time testing, debugging, and verification. Continental may also use this during the actual testing of their vehicles to verify the system is working before they start the test drive.

Team Members (L-R): Ruiming Zhao, Eric Timmreck, Philip Dooley, Justin Hughes, Yuanhao Xu, Xiangying Gao
![]()
MSU College of Veterinary Medicine: Sow Identification and Data Transfer
 Michigan State’s College of Veterinary Medicine is one of the top 10 veterinary schools in the nation. The school boasts top-notch facilities for its students, and the college’s veterinary teaching hospital has one of the largest caseloads in the United States. This provides valuable experience for students in such areas as infectious diseases and cancer care for farm animals.
Michigan State’s College of Veterinary Medicine is one of the top 10 veterinary schools in the nation. The school boasts top-notch facilities for its students, and the college’s veterinary teaching hospital has one of the largest caseloads in the United States. This provides valuable experience for students in such areas as infectious diseases and cancer care for farm animals.
Part of the mission of the Vet-med Program is to push the boundaries of veterinary science. Every year approximately 50% of all breeding sows in America are lost to illness. There are simply too many sows for farmers to keep track of, causing many of them to succumb to illness.
The Locomotive Identification Tracking system will monitor multiple sows as they pass through an area, identify those whose health may be a concern, and create a database of sows to help the farmer identify those that require medical attention. The designed system will use a Microsoft Kinect sensor combined with QR and RFID sensors to identify and help locate an unhealthy sow.
The Locomotive Identification Tracking system will save the farmer time and money by increasing the efficiency of the farm, improving living conditions, and decreasing mortality rates of sows.
Team Members (L-R): Zak Driscoll, Ben Lindquist, Charles Mersereau, Parikshit Chahal, Terlumun Nyamor, Joshua Friday
![]()
MSU Electrical and Computer Engineering Dept.: Radar Micro-Doppler Classification for Autonomous Vehicles

Autonomous Vehicles are becoming an ever increasing trend in the automobile industry. Several major companies have shifted their R&D teams to further advance autonomous driving technology. By 2020, many major automobile companies such as BMW, Ford, Audi and Tesla are planning to release their own fully autonomous vehicles, and it is vital for these vehicles to have the proper technology to ensure the safety of both drivers and pedestrians.
One of the most critical parts of the autonomous vehicles is sensors. The sensors must be precise and accurate in order for the system to determine if the car should stop or continue to go forward.
Our team has been tasked to design and create a device that is able to classify whether the moving object detected by the sensor through the use of radar is either a human or a vehicle. The project has been divided into two sectors, the hardware and software. The hardware system will include design of subsystems for data acquisition from the radar, noise filters, signal amplifiers and digitizer. The digitized signal will then be sent to the USB Interface for further analysis. The software developed will analyze the received signal using a Neural Network. The Neural Network algorithm will be trained and validated using a set of observational data. The trained Neural Network will be used to classify new data from the radar in real-time.
Autonomous Vehicles are becoming an ever increasing trend in the automobile industry. Several major companies have shifted their R&D teams to further advance autonomous driving technology. By 2020, many major automobile companies such as BMW, Ford, Audi and Tesla are planning to release their own fully autonomous vehicles, and it is vital for these vehicles to have the proper technology to ensure the safety of both drivers and pedestrians.
Team Members (L-R): Alamzadeh Muhammadidban, William Duggan, Donovan Riley, Chengsi Liu, Patrick Kim, Mohamed Stouka
![]()
MSU Electromagnetics Research Group: Autoclave System for Thin Film Lamination
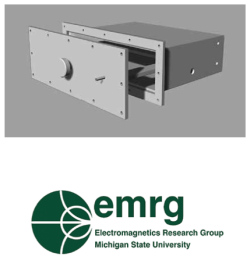 The Electromagnetics Research Group (EMRG) is researching multilayer liquid crystal polymer (LCP) lamination techniques for use in the fabrication of high frequency (microwave and millimeter wave) flex circuits. A pressurized and temperature controlled system is required for the lamination of multilayer LCP films. The challenge is to achieve uniform lamination with good alignment tolerance and void-free. The circuit size to be fabricated can range from 1 cm2 to 1 ft2.
The Electromagnetics Research Group (EMRG) is researching multilayer liquid crystal polymer (LCP) lamination techniques for use in the fabrication of high frequency (microwave and millimeter wave) flex circuits. A pressurized and temperature controlled system is required for the lamination of multilayer LCP films. The challenge is to achieve uniform lamination with good alignment tolerance and void-free. The circuit size to be fabricated can range from 1 cm2 to 1 ft2.
The project is divided into two phases. The first phase involves demonstration of functioning prototype circuits that uses films that can be laminated at lower temperature (~250 °C) and pressure (~30 psi). The second phase involves research of a high pressure (100 psi) and high temperature (~350°C) chamber not achieved by the first phase.
The goal of the research project is to display the ability of an inert pressurized, temperature controlled table-top system to fabricate circuit structures for use by the Electromagnetics Research Group.
My involvement includes both the system assembly, the integration of a microcontroller remote control system, and a programmable logic controller (PLC) interface for the temperature control and demonstration of prototype circuits. This will allow for real-time control of time, temperature and pressure for large area thin film lamination.

Team Member: Cameron Crump
![]()
NDE Lab at Michigan State University: Eddy Current Conductivity Meter
Non-destructive Evaluation (NDE) is collection of sensor technologies and analysis techniques used by industry to evaluate the structural integrity of material without causing any damage. NDE is often used for quality control in manufacturing industries to find flaws before they can become a more serious problem.
 One method of NDE uses a technique with eddy currents. Eddy currents are produced by electromagnetic induction of a coil. This can be done with an alternating current. When the coil approaches a conductive material, magnetic induction will occur and eddy currents will be induced in the material. Flaws in the material change the phase and amplitude of the eddy current and can be detected by the impedance change in the coil. Through this, damages or flaws can be found.
One method of NDE uses a technique with eddy currents. Eddy currents are produced by electromagnetic induction of a coil. This can be done with an alternating current. When the coil approaches a conductive material, magnetic induction will occur and eddy currents will be induced in the material. Flaws in the material change the phase and amplitude of the eddy current and can be detected by the impedance change in the coil. Through this, damages or flaws can be found.
The goal of this project is to develop an eddy current probe that can be seamlessly integrated with a smartphone for efficient and hand-held NDE inspection. The smartphone can drive our designed probe; generate, receive and process time- varying eddy current signals to measure the electromagnetic material properties of sample under test (SUT); and display the results on a user-friendly GUI.
Using an app and a smartphone provides a low-cost and simple to use alternative to Eddy Current Meters currently on the market. This approach will allow information to be shared easily among others in the industry.
Team Members (L-R): Yu Dong, Jesse Wolven, Alejandro Sanchez, Matthew Ignatowski
![]()
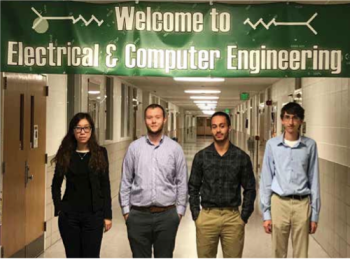
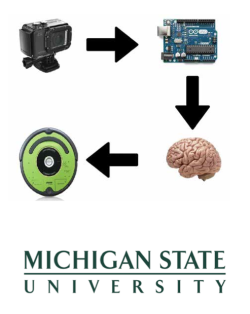
MSU Electrical and Computer Engineering: Autonomous Robot Navigation
Canvas is a program at MSU that is working towards having an integrated system that will be used by transportation vehicles to communicate with each other, their occupants, the environment, and infrastructure to make real-time decisions using the data collected from these sources.
 Autonomous vehicles have been around since the 1980s, and in 1995 Carnegie Mellon Robotics Institute completed the first cross country trip in an autonomously controlled vehicle. Today, many cars have autonomous features such as being able to stay in a lane, self-parking, and automatic emergency braking.
Autonomous vehicles have been around since the 1980s, and in 1995 Carnegie Mellon Robotics Institute completed the first cross country trip in an autonomously controlled vehicle. Today, many cars have autonomous features such as being able to stay in a lane, self-parking, and automatic emergency braking.
Our Autonomous Robot Navigation system is based on having an iRobot trained to navigate through an environment by collecting data and using image processing in order for it to make real-time decisions on its own. The capabilities of the designed navigation system will be demonstrated in Michigan State Engineering Building hallways. The iRobot will travel the hallways while automatically staying on the right side of the hall and being able to make turns, if needed.
The Hardware used is an iRobot, Arduino micro- controller, Movidius neural stick, ASUS Tinker Board, 720P camera. The software used to integrate the hardware will be Python, C++, and C.

Team Members (L-R): Garik Goldwater, Abby McQuade, Jacob DeSantis, Sonja Berger, Alex Masakowski, Solomon Remmo
![]()
ArcelorMittal: Process Automation Monitor
 ArcelorMittal is the world’s largest steel producer. ArcelorMittal owns and operates 27 facilities in the United States, including mines, integrated steelmaking facilities, mini-mills and finishing operations. All ArcelorMittal facilities have process automation teams; these teams are responsible for streamlining the processes that are run and improving efficiency.
ArcelorMittal is the world’s largest steel producer. ArcelorMittal owns and operates 27 facilities in the United States, including mines, integrated steelmaking facilities, mini-mills and finishing operations. All ArcelorMittal facilities have process automation teams; these teams are responsible for streamlining the processes that are run and improving efficiency.
Currently, the process automations systems do not identify and report problems. Detecting these problems manually consumes time and can be detrimental to the productivity of the manufacturing units.
Our team will be implementing a process automation monitoring solution that covers all devices and services. The monitoring solution will provide a complete overview of component health, and if any problems are detected, fix them immediately. Along with identifying these issues, the system will notify the user and keep an accurate record of each case.

Team Members (L-R): Mitchai Fejedelem, Eric Ofori-Peprah, Chigoziem Offor, Ahmed Alismail, Arnold Mutoyoba, Sky Patel
![]()
MSU Electrical and Computer Engineering Dept.: Handheld Device to Detect Cracks in Aircraft
 Nearly 700 million people boarded planes in the US in 2015. The safety inspections for material integrity developed by the aviation industry are primarily visual in nature due to the need to have speedy checks to get the plane flying as quickly as possible. This can become problematic when cracks and deformations form in the material but are not on the surface level. Engineers have developed methods for nondestructive evaluation of materials to detect these internal fractures. The primary method for detection is Eddy Current Analysis. This method is executed using bulky and expensive equipment which is not ideal for use between flights.
Nearly 700 million people boarded planes in the US in 2015. The safety inspections for material integrity developed by the aviation industry are primarily visual in nature due to the need to have speedy checks to get the plane flying as quickly as possible. This can become problematic when cracks and deformations form in the material but are not on the surface level. Engineers have developed methods for nondestructive evaluation of materials to detect these internal fractures. The primary method for detection is Eddy Current Analysis. This method is executed using bulky and expensive equipment which is not ideal for use between flights.
The purpose of this project is to develop a smaller and less expensive eddy scope that can perform the same task as the large scopes but can be used between flights to take data and improve safety.
The handheld device will vary the frequency of alternating current through a coil to produce a magnetic field, which will allow the internal circuitry to measure the impedance of the material. This analog data will be converted to digital data and transmitted over Bluetooth to a phone application where the user can control the coil frequency and be notified of detected fractures.

Team Members (L-R): Nicholas Gajar, John Bono, Peter Jones, Ryan Sajkowski, Ryan Brozovich
![]()
Fraunhofer: SpartanState: A Portable Potentiostat for the Detection of Heavy Metals
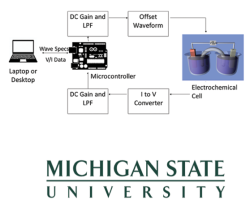 It is extremely critical to accurately measure the presence of dangerous metals, and as shown by the recent Flint water crisis, they can be deadly. Currently, there are only a few ways to measure the concentration of these metals in solutions, and even fewer, if any, low-cost devices for doing so. Dr. Rusinek, at the Fraunhofer Institute, works with potentiostats, a device used to measure concentrations of various metals, but these devices are large, expensive and limited in their measurement capabilities. The main objective of this project is to create a low-cost device to replicate the capabilities of the current lab equipment. This involves building a potentiostat, using square-wave voltammetry to measure concentrations of various metals in samples.
It is extremely critical to accurately measure the presence of dangerous metals, and as shown by the recent Flint water crisis, they can be deadly. Currently, there are only a few ways to measure the concentration of these metals in solutions, and even fewer, if any, low-cost devices for doing so. Dr. Rusinek, at the Fraunhofer Institute, works with potentiostats, a device used to measure concentrations of various metals, but these devices are large, expensive and limited in their measurement capabilities. The main objective of this project is to create a low-cost device to replicate the capabilities of the current lab equipment. This involves building a potentiostat, using square-wave voltammetry to measure concentrations of various metals in samples.
Our device will include a microcontroller to output the square-wave pulses in addition to measuring the current during each pulse. Using this system, data will be collected and output into a computer for plotting and further analysis.
Team Members (L-R): Xingchen Xiao, Nathan Bagnall, Yuzhou Wu, Justin Opperman, Brandon Gevaert
![]()