Electrical Engineering
Projects
Electrical and Computer Engineering ECE 480 Senior Design is required of all electrical and computer engineering majors at MSU.
The following were the project sponsors and projects for Spring 2018:
FRIB: Low-level RF Controller
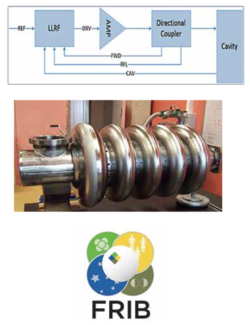 The Facility for Rare Isotope Beams (FRIB) is a new linear accelerator being funded by the U.S. Department of Energy, Office of Science and operated by Michigan State University. Once the FRIB is completed, it will enable scientists across the nation to make discoveries about the properties of rare isotopes, nuclear astrophysics, fundamental interactions, and applications for society, including medicine, homeland security, and industry.
The Facility for Rare Isotope Beams (FRIB) is a new linear accelerator being funded by the U.S. Department of Energy, Office of Science and operated by Michigan State University. Once the FRIB is completed, it will enable scientists across the nation to make discoveries about the properties of rare isotopes, nuclear astrophysics, fundamental interactions, and applications for society, including medicine, homeland security, and industry.
The FRIB is sponsoring our project to design and test a controller for a 644 MHz superconducting resonant cavity. The new controller needs to be designed and tested to deal with the 644 MHz frequency, as the old controllers do not have enough analog input bandwidth. The FRIB is supplying some of the latest technology in analog and digital converters as well as a programmable microcontroller for the project.
Our goal is to design an analog signal chain to direct sample the signal from the new 644 MHz cavity for further processing using the best off-the- shelf components available. A phase locked loop will compare the cavity’s exact resonant frequency to the synchronization signal. Our project will utilize evaluation boards and a coaxial resonant structure to simulate how the cavity will respond at the FRIB.

Team Members (L-R): James Nguyen, Tarun Giridhar, Michael Straub, Kevin Dolinar, Neel Patel, Brendon Johns
![]()
MSU Electrical and Computer Engineering Department: Millimeter Wave Robotic-arm Measuring System
 Millimeter-wave frequencies are becoming more and more essential for various wireless communications and sensing applications. High-speed small cells, millimeter-wave imaging and automotive radars are some examples. Therefore, characterization of antennas is becoming a very important task.
Millimeter-wave frequencies are becoming more and more essential for various wireless communications and sensing applications. High-speed small cells, millimeter-wave imaging and automotive radars are some examples. Therefore, characterization of antennas is becoming a very important task.
Our team has been tasked to design a robotic arm measurement system that will be able to determine the characteristics of millimeter wave antennas.
The robotic arm mechanism will be programmed to rotate the probe antenna by specified angle increments for the desired measurement. The probe antenna will go around the antenna under test (AUT) to gather S-parameter data. A network analyzer will be used to supply a millimeter wave signal between the antennas and collect the necessary S-parameter data to determine antenna charcteristics. The collected data will be sent to a laptop which will process the data and output radiation pattern images and polar plots detailing characteristics of the AUT.
A user interface will be created to allow users to determine what type of plot they wish to have produced from the data and angle increment for level of resolution.

Team Members (L-R): Zehua Li, Aaron Perry, HyungSok Oh, Zizhuo Huang, Pengiu Yang
![]()
Orphans International Helpline (OIH)/MSU RCPD: Hospital Power Monitoring System
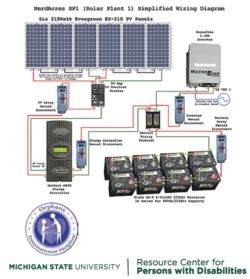 The OIH hospital in Haiti is located in Bombardopolis, 242 kilometers from the capital, Port-au-Prince. The country still has not fully recovered from the devastating earthquake that happened in 2010. Along with earthquakes, the country experiences frequent hurricanes, making living conditions even more difficult. With these conditions, the need for local clinics is critical for the survival of the community. With lack of power infrastructure and inaccessible cities with few power sources, creating these clinics poses a challenge. In light of these hardships however, Haiti contains an abundance of wind and solar energy that they can use as their main sources of power to keep certain facilities running.
The OIH hospital in Haiti is located in Bombardopolis, 242 kilometers from the capital, Port-au-Prince. The country still has not fully recovered from the devastating earthquake that happened in 2010. Along with earthquakes, the country experiences frequent hurricanes, making living conditions even more difficult. With these conditions, the need for local clinics is critical for the survival of the community. With lack of power infrastructure and inaccessible cities with few power sources, creating these clinics poses a challenge. In light of these hardships however, Haiti contains an abundance of wind and solar energy that they can use as their main sources of power to keep certain facilities running.
Our task involves designing a power monitoring system for the OIH hospital in Haiti, which will be used by the hospital to monitor incoming power sources: solar panels, wind generators, batteries, engine generators, and room power availability. Along with the power monitoring system, we are researching what input power sources will be most practical for powering the hospital. These will include specific types of solar and wind power, and how these sources will be integrated into the hospital.

Team Members (L-R): Stefanos Palestis, Kyle Hanson, Michael Perry, Orwell Madovi, Adam Gould
![]()
MSU Resource Center for Persons with Disabilities: Lee Cleaveland’s Prosthetic Bionic Arm
 The Resource Center for Persons with Disabilities (RCPD) is dedicated to assisting and encouraging full participation of students who have disabilities. They thrive on the idea that disabilities do not hinder one from achieving goals and dreams, rather they mandate a greater level of creativity, commitment and a repertoire of compensatory techniques. Lee Cleaveland is an acting student at MSU, registered with the RCPD, and is missing his left arm from the elbow down. His hobbies include playing the guitar and playing sports. Although Lee has mastered life with this disability, he wishes to have a prosthetic arm not only to move better but to help with his daily activities.
The Resource Center for Persons with Disabilities (RCPD) is dedicated to assisting and encouraging full participation of students who have disabilities. They thrive on the idea that disabilities do not hinder one from achieving goals and dreams, rather they mandate a greater level of creativity, commitment and a repertoire of compensatory techniques. Lee Cleaveland is an acting student at MSU, registered with the RCPD, and is missing his left arm from the elbow down. His hobbies include playing the guitar and playing sports. Although Lee has mastered life with this disability, he wishes to have a prosthetic arm not only to move better but to help with his daily activities.
Our team has been asked to work with Lee and his team to design and build the electronic control interface that will operate a motor in a 3-D printed hand to actuate grip. The team will use EMG sensors that will read the neural signals sent to the muscles in the arm, and translate these signals into hand motions on a 3-D printed prosthetic. Steve Blosser, a technology specialist at MSU’s RCPD, is concurrently working with Carlot Dorve, a Haitian MSU graduate who lost his arm in Haiti due to poor medical care. Current prosthetics can cost more than rural families make in one decade. Blosser would also like to use our design to provide low-cost prosthetics to people in developing countries. He believes that an inexpensive option will enable thousands of individuals with disabilities in Haiti.
Team Members (L-R): Sanh Phan, Kyle Cendrowski, Kenedi Price, Jack Christie, Kyle Gray
![]()
Fraunhofer: Rotating/Vibrating Reactor Fixture for Diamond Coating
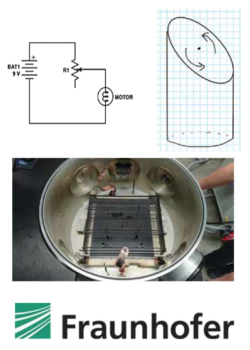 The Fraunhofer Institute is Europe’s largest applied research organization performing projects of direct utility to private and public enterprise and of a wide benefit to society.
The Fraunhofer Institute is Europe’s largest applied research organization performing projects of direct utility to private and public enterprise and of a wide benefit to society.
Diamond has several advantageous properties as a semiconductor material. Applications span across many different fields from biomedical and environmental sensors to electronic and mechanical devices. Always at the forefront of cutting-edge diamond research, the MSU-Fraunhofer Center for Coatings and Diamond Technologies would like to expand upon the current diamond fabrication capabilities by incorporating a new, novel coating fixture. With the current diamond fabrication capabilities at Fraunhofer, substrates are limited to planar geometries such as silicon wafers and metal plates.
Our team is tasked to design and manufacture a rotating fixture for the diamond coating process. This coating fixture should allow coating of powder and other non-planar substrate shapes.
Team Members (L-R): Ibrahim Abudulrahman Sairafi, Jiahui Lu, Yuankun Hong, Honggang Zhuang
![]()
MSU Solar Racing Team: Solar Array Maximum Power Point Tracker
 The MSU Solar Car Racing Team is a primarly undergraduate group that completely designs and builds all aspects of a solar car. To put their design to the test, the team participates in two competitions throughout the summer: the American Solar Challenge, a week-long 2,000-mile journey across seven states, and the Formula Sun Grand Prix, a three-day “Last Car Standing” style race.
The MSU Solar Car Racing Team is a primarly undergraduate group that completely designs and builds all aspects of a solar car. To put their design to the test, the team participates in two competitions throughout the summer: the American Solar Challenge, a week-long 2,000-mile journey across seven states, and the Formula Sun Grand Prix, a three-day “Last Car Standing” style race.
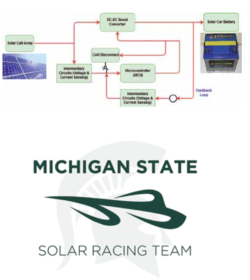
The sole source of propulsion for a solar car comes from the electrical power generated from a photovoltaic cell array, so charging the car battery efficiently is critical. The goal of this project is to design a maximum power point tracker (MPPT) to efficiently charge the car battery from the solar array. The MPPT should boost the lower, variable voltage of the solar array to supply the 130V car battery and obtain the maximum power output of the solar array in any conditions. The maximum power output of the solar array varies with the external illumination and temperature.
The maximum power point tracker will be realized through a DC-DC boost converter and a microcontroller. The microcontroller will locate and obtain the maximum power point of the solar array through the “Perturb and Observe” algorithm implemented in software. This algorithm will continuously alter the duty cycle of the DC-DC boost converter, observe the impact on the solar array output power, and determine how the duty cycle should be altered in the next iteration until the maximum power point is reached. The duty cycle adjustment will be implemented through pulse width modulation from the microcontroller to MOSFET switch of the boost converter. This system will be mounted on the solar car, ensuring operation at temperatures of 110 ̊F and speeds of 60 mph.

Team Members (L-R): Sean Murray, Jack Whinham, Alan Alen, Corey Beyer, Gurveer Deoi, Chris Hawkey
![]()
Aptiv: Tire Pressure Monitoring System
Aptiv is a global technology company headquartered in Gillingham, England. Using industry-leading software capabilities, Aptiv is ushering in the next generation of active safety, autonomous vehicles, smart cities, and connectivity solutions.
 Aptiv’s goal is to transform mobility to a portfolio of safe, green and connected solutions. As a part of accomplishing this, Aptiv set its sights on implementing the Tire Pressure Monitoring System using Bluetooth Low Energy.
Aptiv’s goal is to transform mobility to a portfolio of safe, green and connected solutions. As a part of accomplishing this, Aptiv set its sights on implementing the Tire Pressure Monitoring System using Bluetooth Low Energy.
Bluetooth 5.0 offers many advantages over its predecessor, with an update to Bluetooth Low Energy (BLE). BLE allows for low power consumption, a higher data rate, and longer range.
Monitoring tire pressure is key to ensuring the longevity of the tire, along with an efficient fuel economy and also plays a vital role in passenger safety. A tire with 15% under the ideal pressure lasts 1⁄2 year less than an ideal tire. At 20% under ideal pressure, fuel consumption rate increases by 4%. Finally, at 30% under ideal pressure, the tire wear rate increases by 50%.
The system level breakdown of our project is comprised of a tire pressure sensor installed on a tire communicating with a transmitter microcontroller. This microcontroller will receive the pressure data from the sensor and, using Bluetooth 5.0, will send this data to a receiver microcontroller. Finally, the receiver microcontroller will run analysis on the pressure data and transmit it through a physical connection to be displayed on a monitor.
Team Members (L-R): Benjamin Roytburd, John Slavin, Mark Leja, Raymond Huang, Thomas Szilard, Tom Humphrey
![]()
CANVAS/AutoDrive Challenge: Lane Following and Obstacle Avoidance
 The Autodrive Challenge is a collegiate student design competition with a focus on designing and building autonomous vehicles. The competition is sponsored by General Motors, SAE International, and many other companies involved in the autonomous vehicle industry. The competition has a three-year duration, during which student design teams from eight different universities are tasked with equipping a Chevy Bolt with the necessary technology to achieve the status of a level four autonomous vehicle.
The Autodrive Challenge is a collegiate student design competition with a focus on designing and building autonomous vehicles. The competition is sponsored by General Motors, SAE International, and many other companies involved in the autonomous vehicle industry. The competition has a three-year duration, during which student design teams from eight different universities are tasked with equipping a Chevy Bolt with the necessary technology to achieve the status of a level four autonomous vehicle.
The team has been challenged with building autonomous systems to find and maintain vehicle position within lane lines on a roadway, as well as detecting and avoiding obstacles that might be in the vehicle’s path. This project’s focus is to develop the software required to accurately detect lane lines in the environment of a vehicle, prevent the vehicle from colliding with any obstacles, and enable passing maneuvers whenever possible.
To meet the functional requirements of our project, the vehicle will have multiple distinct subsystems including perception, sensor fusion, motion planning, motion control, and vehicle interfacing.

Team Members (L-R): Boyuan Sun, DJ Seeds, Ryan Ashbaugh, Kyle Lammers, Manoj Agarwal
![]()
CANVAS/AutoDrive Challenge: Autonomous Vehicle Safety & Integrity Monitor (SIM)
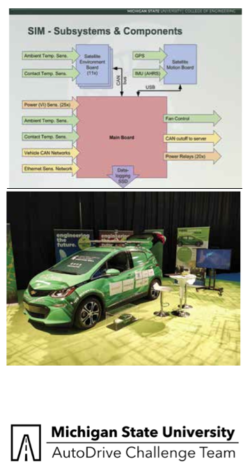 An independent hardware system to monitor the safety and integrity of signals and systems on the vehicle is proposed. Our team will design this Safety and Integrity Monitor (SIM) system to sense and react to vehicle performance and system performance.
An independent hardware system to monitor the safety and integrity of signals and systems on the vehicle is proposed. Our team will design this Safety and Integrity Monitor (SIM) system to sense and react to vehicle performance and system performance.
The vehicle performance will be monitored through an Inertial Measurement Unit (IMU) and will communicate driving quality to the main driving computer. If necessary, the SIM will disconnect the driving computer from the CAN bus, effectively disabling autonomous operation. The physical health of sensors will be monitored through voltage and current draw, while their operational health will be monitored by analyzing the data returned.
Additionally, ambient and contact temperatures will be monitored and controlled by a network of fans around the vehicle, evacuating hot air from the vehicle through vents if necessary. Finally, this device will function as a “Black Box,” data-logging all recordable metrics for later use in optimization or failure analysis.

Team Members (L-R): Steven Yik, Jason Merlo, Anton Schlegel
![]()
Tenneco: Road Condition Reporting System
 Tenneco is a worldwide manufacturer of automotive components that include aftermarket ride control and emission products for vehicles. As vehicles become more automated, the ride control and predictive nature of their decision-making will also become automated by taking advantage of various detection and vision systems. These systems will enable Tenneco to have more data for controlling the ride performance of vehicles, and included in this data will be road condition information.
Tenneco is a worldwide manufacturer of automotive components that include aftermarket ride control and emission products for vehicles. As vehicles become more automated, the ride control and predictive nature of their decision-making will also become automated by taking advantage of various detection and vision systems. These systems will enable Tenneco to have more data for controlling the ride performance of vehicles, and included in this data will be road condition information.
The Road Condition Reporting System will gather and record road condition information through the use of a mobile application. The designed system will function as a maps application which can give directions and create markers for an end user while driving through the integration of Google Maps using the Google Maps API. The system will record both user input and sensor data to record the locations of potholes and poor road conditions in a SQL Database and automatically report potholes to the MDOT Pothole Reporting website.
The System will increase the safety of drivers by allowing them to see where potholes are relative to their vehicles and allowing for an automated system to report potholes. The more frequent and detailed reporting of potholes to the state of Michigan will allow roads to be fixed at a faster rate, and place less stress on the ride performance of vehicles.

Team Members (L-R): Sean Zanyk McLean, Kevin Scott, Ryan Yergin, Weili Xu, Dena Mujtaba, Qiuyang Yue
![]()
MSU Electrical and Computer Engineering Department: Pet Accident Detection
 Our design team was tasked with prototyping a new product in the market of robotic pets and robotic pet care. We will be conducting research on different market sectors to find a device that is in an underutilized area or to design a new product that is not currently available on the market.
Our design team was tasked with prototyping a new product in the market of robotic pets and robotic pet care. We will be conducting research on different market sectors to find a device that is in an underutilized area or to design a new product that is not currently available on the market.
The robotic pet market is already full of many different products, and our team decided to focus on a device for cleaning up after a pet. We are working on designing a system to detect if an animal accidentally relieves itself inside the home and send a notification of which room it is in. Eventually, this system would be used to alert a more advanced cleaning robot to go to that room and take care of the mess without the owner needing to do anything.
Team Members (L-R): Yuyang Ji, Guohao Sun, Mirza Hadzialijagic, Kan Cheng
![]()
MSU CSANN Lab: Portable Deep Neural Networks for Image Classification
 The Circuits, Systems and Artificial Neural Networks Laboratory (CSANN) is a research group at MSU that specializes in artificial neural network algorithms. These neural networks are systems patterned after the neurons found in a human brain and have demonstrated appealing capabilities in image recognition and classification.
The Circuits, Systems and Artificial Neural Networks Laboratory (CSANN) is a research group at MSU that specializes in artificial neural network algorithms. These neural networks are systems patterned after the neurons found in a human brain and have demonstrated appealing capabilities in image recognition and classification.
With the increased integration of technology on smartphones, most smartphone owners have access to the sensors needed in order to produce valid input for classifying neural networks. Giving the owner a way to interact with these networks using their phone would grant the owner the ability to receive instant processing information from the sensor data they can access.
Our team will be creating a prototype based on the idea of a portable deep neural network. The prototype will allow a smartphone user to capture an image on their phone, run the image through a classification network, and have the result of the classification displayed on the phone screen. The network will be loaded onto a portable, embedded device that will be powered by an external battery and plug into the phone.
Team Members (L-R): Travis Leffel, Alan Chen, Dinmukhammed Aimurzayev, Edward Vasquez, Bingquan Gu, Xiao Chang
![]()
The James Dyson Foundation: Compact Multi-Sensor System
 All manufactured products need to be tested to ensure that the material integrity is upheld. In many cases, cracks or defects in a material are not visible to the human eye. As of today, the devices and techniques used to detect cracks in structures are expensive and not easily portable.
All manufactured products need to be tested to ensure that the material integrity is upheld. In many cases, cracks or defects in a material are not visible to the human eye. As of today, the devices and techniques used to detect cracks in structures are expensive and not easily portable.
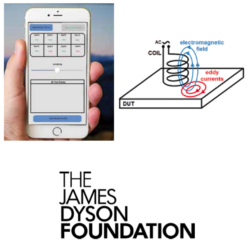
The James Dyson Foundation is seeking to develop a small inexpensive portable system to detect cracks/ defects in structures that can be displayed on an iOS app. Allowing ease of testing on manufactured surfaces will help prevent premature failures and improve the overall safety of the product. The application that our team is focusing on is an aluminum airplane wing.
A handheld wireless device comprising a differential coil array will be designed to use eddy currents to measure changes in impedance as it moves across the surface of a structure. The analog information collected from the coil array will be converted to digital by the AD5933, an impedance converter, within the handheld device. The AD5933 will perform a discrete Fourier transform which will return the magnitude of the impedance and relative phase at each frequency point. The AD5933 device will then send the digital format data to a Raspberry Pi 3+ which is connected to a Bluetooth module. The data will be sent to the iOS app, where it will be analyzed to display the coil impedances in a simple text format, and a heat graph to show concentrations of changes in detected impedance.
Team Members (L-R): Marcus Collins, Westin Lane, Garrett Parks, Shubo Chen, Jiyan Shi
![]()
Union Pacific: Ultrasonic Rail Testing
 Union Pacific is one of America’s leading transportation companies and operates a 32,100-mile network of railroads in North America. The railroads cover two- thirds of the western United States and cross through 23 different states.
Union Pacific is one of America’s leading transportation companies and operates a 32,100-mile network of railroads in North America. The railroads cover two- thirds of the western United States and cross through 23 different states.
Stress in rails occurs when the rail is either at a temperature hotter or colder than its neutral temperature, defined as the temperature when the rail is neither in tension nor compression, giving stress-free conditions. The neutral temperature is important to know because if the rails are not installed correctly, it can lead to derailments.
The project objective is to investigate whether ultrasonic technology can be utilized to determine the stress and temperature of the rail. Since the density of rail varies with temperature, speed of sound through the rail will also change. Our project will use the data from an ultrasonic device to calculate speed of sound, then compare current speed with the speed in neutral temperature to determine whether the rail is in tension or compression.
Team Members (L-R): Zhengze Liu, Shihao Meng, Jordie Liao, Kellen Collison, Corey Wysozan, Shu Liu
![]()
MSU Electrical and Computer Engineering Department: Voice Fitbit
 Michigan State University’s Electrical and Computer Engineering Department has requested the development of a new type of wearable technology that will track the daily vocal health of a user.
Michigan State University’s Electrical and Computer Engineering Department has requested the development of a new type of wearable technology that will track the daily vocal health of a user.
Wearable technology has been around since the 1980s, when Casio started to mass produce calculator watches. Today, wearable technology has become part of everyday life. From smart watches, such as the Apple Watch, to Samsung’s Virtual Reality Headsets, many devices, such as a fitbit, provide data related to the physical health of the user.
Our Wearable device, the “Voice Fitbit,” will provide data regarding the vocal health of the user. Vocal health data can also be used to interpret the emotion of the user, such as angry or happy, and whether they are ill. In order to appropriately demonstrate useful functionality in this device, a lightweight and compact board with the necessary processing and audio recording peripherals will be researched in the hardware design.
Team Members (L-R): Brent Cavner, Austin Winarski, Wanxuan Chen, Ibnui Khan, Ruikai Chen
![]()