Electrical Engineering
Projects
Electrical and Computer Engineering ECE 480 Senior Design is required of all electrical and computer engineering majors at MSU.
For information on becoming a project sponsor, please contact Gregg Motter.
The following were the project sponsors and projects for Spring 2016:
Michigan State University: In-shoe Weight Sensor
 In an effort to become healthier, many people have begun to look to technology as a means of bettering themselves. The reason for the success of many of these devices is that they allow each user to individually track their progress towards becoming a healthier, more active person, becoming, in effect, a “personal trainer.” To this end, Dr. Wolfgang Bauer, Department of Physics and Astronomy, Michigan State University, began to develop a scientific interest in the features of these many health-oriented devices. There are currently many devices available in this market, yet none that allow a user to track their weight without requiring them to step onto a scale. After consideration of possible solutions, the concept of an in- shoe force sensor was ultimately chosen as the best option.
In an effort to become healthier, many people have begun to look to technology as a means of bettering themselves. The reason for the success of many of these devices is that they allow each user to individually track their progress towards becoming a healthier, more active person, becoming, in effect, a “personal trainer.” To this end, Dr. Wolfgang Bauer, Department of Physics and Astronomy, Michigan State University, began to develop a scientific interest in the features of these many health-oriented devices. There are currently many devices available in this market, yet none that allow a user to track their weight without requiring them to step onto a scale. After consideration of possible solutions, the concept of an in- shoe force sensor was ultimately chosen as the best option.
By installing the device in a pair of shoes, the user would be able to view their weight throughout the day so long as they have their shoes on. In order to make the device more user friendly and commercially accepted, the shoe would also have to connect to a smartphone via a wireless connection. This would allow users to navigate a simple application in order to view the readout of their in-shoe weight sensor. By creating this novel device, a large gap that currently exists in health tracking devices would be filled and great strides could be made in the market.

Team Members (L-R): Göksu Adanali, Alex Chambery, Mohamadou Diatta, Steven Criner, Alexandra Mackenzie
![]()
Great Lakes Control & Engineering and Conceptual Innovations: Regenerative Electric Driven Power Cart
The main goal of our project was to create a control system for a regenerative electric driven power cart. Our team wanted to impact companies in a revolutionary way where people do not have to put in as much effort into pushing heavy materials.
 The purpose of having regenerative electric driven power carts is to help prevent the average worker from exerting lots of physical energy. The electric driven cart will allow the worker to easily move parts to their respective areas. It also provides its own regenerative power to last a full workday without plugging in to charge.
The purpose of having regenerative electric driven power carts is to help prevent the average worker from exerting lots of physical energy. The electric driven cart will allow the worker to easily move parts to their respective areas. It also provides its own regenerative power to last a full workday without plugging in to charge.
The electric driven power cart will be useful for many companies that have a lot of parts and supplies that have to be moved. This cart can withstand up to 8,000 pounds of material without slowing down in speed.
The electric driven cart is customer-friendly and has a controlled speed. This allows the user to only use two buttons: forward and reverse. Safety features such as an E-Stop button are also added to prevent injury.
The image pictured on the right shows where the control system will be placed on the cart. The control system will be on the bottom side of the cart with the control panel below the handlebar.
This project uses a fully programmable microcontroller, charge controller, and a motor controller. These three parts are all combined into one component.
Team Members (L-R): Daniel Jarratt, Neil Damani, Zhongyang Wang, Zhenghze Zhu, Rui Zhang, Ning Zheng
![]()
Great Lakes Controls & Engineering: Aeroponic Control System
Great Lakes Controls & Engineering is interested in developing an automatically controlled aeroponic system for growing leafy greens. They have tasked the ECE 480 Design Team 8 with developing a prototype. The intention is to eventually mass produce this system and make it available to all, so the team and sponsor hope that this prototype will lay the foundation for future work on further developing such a system for commercial use.
 The main objective of this project was to create an automatically controlled closed-loop system for growing leafy greens in a small space. The plants will be grown aeroponically, which is to say that there will be no growth medium. Rather, the plants’ roots will be suspended in air and sprayed with nozzles at regular intervals. The system water is stored in a tank below the growing area. The tank has a pump to boost the water to high enough pressure to push the water through the nozzles. Lighting for the system is provided by rows of LED lights suspended above the plants that produce the proper spectrum of light to ensure efficient growth.
The main objective of this project was to create an automatically controlled closed-loop system for growing leafy greens in a small space. The plants will be grown aeroponically, which is to say that there will be no growth medium. Rather, the plants’ roots will be suspended in air and sprayed with nozzles at regular intervals. The system water is stored in a tank below the growing area. The tank has a pump to boost the water to high enough pressure to push the water through the nozzles. Lighting for the system is provided by rows of LED lights suspended above the plants that produce the proper spectrum of light to ensure efficient growth.
The system is housed within an aluminum frame with a plexiglass enclosure for the roots and nozzles. It is controlled by the user through a Human Machine Interface (HMI) that interacts with various sensors, a solenoid valve, lights, and fans to control and monitor all aspects of the system through a microcontroller. The system runs off of 120VAC and is Wi-Fi accessible.
Team Members (L-R): Beiting Huang, Saleh Alghamdi, Samuel Metevia, Patrick Pomaville, Justin Fecteau, Jacob Jones
![]()
Student Developed Project: IV Assistant Robot
 An area of potential improvement in the day-to-day operations of hospitals is the method by which intravenous (IV) therapy is currently administered. The typical IV pole, on which an IV pouch is attached to the patient via a line, is an area rife with potential improvement. These IV poles are unstable and difficult to move, especially for weakened, disabled, or otherwise incapacitated patients. This causes an unfavorable situation where patients must either struggle to move while on IV therapy, potentially tripping and falling, or must move with the help of a healthcare professional, which is inhibitive to both the patient’s independence as well as the health care personnel’s time and efforts.
An area of potential improvement in the day-to-day operations of hospitals is the method by which intravenous (IV) therapy is currently administered. The typical IV pole, on which an IV pouch is attached to the patient via a line, is an area rife with potential improvement. These IV poles are unstable and difficult to move, especially for weakened, disabled, or otherwise incapacitated patients. This causes an unfavorable situation where patients must either struggle to move while on IV therapy, potentially tripping and falling, or must move with the help of a healthcare professional, which is inhibitive to both the patient’s independence as well as the health care personnel’s time and efforts.
We will address this issue by replacing the traditional IV pole with an autonomous robot capable of following the patient wherever they need to go whilst avoiding collision hazards. This robotic device must be able to accurately track the patient as well as the environment and to constantly adjust its position as is appropriate. Naturally, it will have to fulfill all of the load-carrying work of the traditional IV pole as well as to be able to do so at a speed that will accommodate a patient moving at walking pace.
This robot will be of a similar look and feel to a traditional IV pole, but with a robotic base to house all of the necessary motors, sensors, and other electronics. Other peripherals will include a wearable wristband that will serve as the tag that the robot will follow, and a charging base that the robot will sit upon while not in active use.

Team Members (L-R): Vincent Zickefoose, Brandon Hart, Lam Nguyen, Bhim Khanal
![]()
General Motors: Vehicle Interior Noise Measurement System
 General Motors (GM) has been creating quality automobiles for over one hundred years. Since it was founded, the company has consistently been one of the largest manufacturers of automobiles. This is because consumers know that they will experience a comfortable and quiet ride whenever they choose a GM vehicle. Our project is centered around the company’s quality assurance and improving the methods that automakers use to measure the interior acoustics of their vehicles while in operation.
General Motors (GM) has been creating quality automobiles for over one hundred years. Since it was founded, the company has consistently been one of the largest manufacturers of automobiles. This is because consumers know that they will experience a comfortable and quiet ride whenever they choose a GM vehicle. Our project is centered around the company’s quality assurance and improving the methods that automakers use to measure the interior acoustics of their vehicles while in operation.
Our team has created a system for measuring the interior noise levels of operating vehicles. This system ensures repeatable and reproducible results across multiple vehicles and driving terrains. Using this system, the team was able to take vehicle measurements to verify the correct operation of the system. The team was also able to provide insight into the engineering process used to develop this system, which can be used by GM to assist in the development of new SAE and ISO standards, as well as for government regulation.
Team Members (L-R): Abdelrahman Abduljaber, Julien Brown, Chen Yu, Deliang Wang
![]()
ArcelorMittal: Conveyor Transfer System
 ArcelorMittal is the world’s largest steel producer, producing almost twice the amount of steel of the next highest producer, at over 98 million tons in 2014. Its second largest plant in the US, located in Burns Harbor, Indiana, uses a series of conveyor belts to move the very heavy coils (up to 35 tons) from the hot mill to the finishing mill.
ArcelorMittal is the world’s largest steel producer, producing almost twice the amount of steel of the next highest producer, at over 98 million tons in 2014. Its second largest plant in the US, located in Burns Harbor, Indiana, uses a series of conveyor belts to move the very heavy coils (up to 35 tons) from the hot mill to the finishing mill.
Today, an operator presses a button to stop the hot mill conveyor when the coils are positioned at the center of the lift. They are then lifted from their position on the conveyor by a lift system underneath the hot mill conveyor so the forklift system can get underneath the coils. Once propped up by the lift, the forklift attached to the finishing mill conveyor can move underneath the coils before the lift is lowered to set the coils on the forklift. The forklift can now move backwards towards the finishing mill conveyor, place the coil on the belt, and move back to its original position to repeat the process. Our team’s goal is to eliminate the need for an operator by having a sensor acquire the position of the coil and automate the process by sending feedback to a microcontroller, which can process the signal and response to control the conveyor. An alarm is also initiated at the start of the transfer and runs for its duration to warn nearby employees that heavy machinery is being used to move the coils.
Team Members (L-R): Haojun Wang, Ruowan Ji, Mark Zatorski, Yun Lou, Jiawei Wu
![]()
MSU RCPD, Asian Aid, and Texas Instruments: Wheelchair Motor Control Circuit Design
Electric wheelchairs are extremely vital to the well-being of many handicapped people around the world. These wheelchairs are typically powered using DC motors but these can be too costly for many of the impoverished people around the world and specifically the people of Bobbili, India.
 ECE 480 Team 4 is proposing to develop an electric wheelchair that would use an automotive alternator in place of the DC motor, helping to make the wheelchair more affordable for the people of Bobbili.
ECE 480 Team 4 is proposing to develop an electric wheelchair that would use an automotive alternator in place of the DC motor, helping to make the wheelchair more affordable for the people of Bobbili.
The proposed design would convert an automotive alternator into a PMAC DC motor which would significantly reduce the cost while potentially producing more torque with better efficiency.
Team 4 will be improving on last semester’s ECE 480 Team 9 project by implementing a drive microcontroller capable of detecting rotor position without the use of external sensors. This design improvement will decrease the cost of production. Also, additional functionality will be added such as reverse drive direction and regenerative braking.

Team Members (L-R): Bowen Tan, Qibing Xu, Courtney Smith, Ahmed Altairy, Junyi Yao, Derek Fead
![]()
MSU RCPD and MSU Demmer Center
The overarching goal of the Other-than-sight (OTS) Marksman Guidance System (MGS) is to provide visually impaired persons with the ability to operate a firearm in a manner as identical as possible to a sighted shooter. Vision related disabilities commonly impede the use of devices developed around sight, barring participation in many activities such as marksmanship. By enabling visually impaired persons to engage in shooting activities, such persons will have the opportunity to enjoy an experience previously denied to them by their disabilities.
 Beginning in January of 2015, the Demmer Center and the Resource Center for Persons with Disabilities (RCPD) began a collaboration to develop a method for visually impaired persons to operate a rifle. This resulted in a system utilizing a spotting scope, headphones, and a modified target. The magnification of the scope reduced the field of vision at 50ft to a much smaller area than the target. This allowed differentiation of the target from the background using a photo-resistor. Generation of audio feedback was used to indicate proper aim.
Beginning in January of 2015, the Demmer Center and the Resource Center for Persons with Disabilities (RCPD) began a collaboration to develop a method for visually impaired persons to operate a rifle. This resulted in a system utilizing a spotting scope, headphones, and a modified target. The magnification of the scope reduced the field of vision at 50ft to a much smaller area than the target. This allowed differentiation of the target from the background using a photo-resistor. Generation of audio feedback was used to indicate proper aim.
Functionality was far from refined, however. The OTS MGS vastly improves the effectiveness of its predecessor by utilizing computer vision and haptic (physical) feedback. A firearm-mounted laser is used to project the point-of- aim, while a second laser is used to “paint” the target. A digital camera and Raspberry Pi 2 microcontroller track the monochromatic light of the lasers on the target. Increased distance between the lasers is then communicated to the user via increased strength of vibration from an Eccentric Rotating Mass (ERM) motor.
Team Members (L-R): Xuan He, Alexander Marlow, Jiaming Ye, Dan O’Donovan
![]()
MSU ECE Department: agBOT Agricultural Robotics Vehicle
Agricultural robotics is an aspect of farming and agriculture that is growing rapidly as technology gets more in-depth. The idea of an agBOT (Agricultural Robot) is simply to take over the “mindless” work of planting seed over great distances; a job that farmers face day in and day out.
 As part of Design Group 10, our goal is to manufacture, from the ground up, a scalable prototype of an agBOT. This scalable finished product will be size of an RC car, and the technologies we incorporate will be easily transitioned to a full size agBOT (a truck, bobcat, etc.) When our prototype is complete, a future team will be able to clearly see our design of the agBOT, a detailed layout and schematic of its subsystems, and our overall intent for the future of how the agBOT should function.
As part of Design Group 10, our goal is to manufacture, from the ground up, a scalable prototype of an agBOT. This scalable finished product will be size of an RC car, and the technologies we incorporate will be easily transitioned to a full size agBOT (a truck, bobcat, etc.) When our prototype is complete, a future team will be able to clearly see our design of the agBOT, a detailed layout and schematic of its subsystems, and our overall intent for the future of how the agBOT should function.
In the end, we plan to improve observation, intervention, and analytic data storage within agricultural work methods. This robot should be able to provide real- time video feed while it works, and be able to drive itself to user-inputted GPS coordinates.
A RC car, pictured on the right, was used because of its motor, its size, and the power associated with it. The best microcontroller is a Raspberry Pi. This device is a mini computer that can be programmed to do essentially anything, and is highly compatible with cameras, GPS, and motors. Everything is done within a $500 budget provided by our sponsor the MSU ECE Department.

Team Members (L-R): Jeff Walthers, Joe Schmitz, Nick Mirallegro, Wen Ni, Eric Testa, Sean Ellison
![]()
DTE Energy: Evaluation of Conductors
DTE Energy Electric generates, transmits and distributes electricity to 2.1 million customers in southeastern Michigan. With an 11,084 megawatt system capacity, the company uses coal, nuclear fuel, natural gas, hydroelectric pumped storage and renewable sources to generate its electrical output. Founded in 1903, DTE Energy Electric is the largest electric utility in Michigan and one of the largest in the nation.
 With regard to the distributed aspects of operation, DTE is working with Michigan State University to conduct a research project for a cost analysis of the operation of various overhead conductors used in primary power distribution systems.
With regard to the distributed aspects of operation, DTE is working with Michigan State University to conduct a research project for a cost analysis of the operation of various overhead conductors used in primary power distribution systems.
The cost analysis will take into account not only the initial cost of purchasing and installing the conductors but also the cost incurred from the resistive power losses in conductor. The operating conditions of these conductors are a transmission voltage of 13.2 kV and loading between 8 MVA (typical) and 12 MVA (emergency).
A report will be generated for DTE outlining which conductor will be most economical for their purposes and the reasoning behind the recommendation. Along with the report, a tool will be produced in order to allow DTE to quickly and easily perform this cost-versus-loading analysis for other conductors and distribution systems

Team Members (L-R): James Wedell, Aaron Noga
![]()
MSU ECE Department: agBOT Agricultural Robotics Vehicle
Agricultural robotics is an aspect of farming and agriculture that is growing rapidly as technology gets more in-depth. The idea of an agBOT (Agricultural Robot) is simply to take over the “mindless” work of planting seed over great distances; a job that farmers face day in and day out.
As part of Design Group 10, our goal is to manufacture, from the ground up, a scalable prototype of an agBOT. This scalable finished product will be size of an RC car, and the technologies we incorporate will be easily transitioned to a full size agBOT (a truck, bobcat, etc.) When our prototype is complete, a future team will be able to clearly see our design of the agBOT, a detailed layout and schematic of its subsystems, and our overall intent for the future of how the agBOT should function.
In the end, we plan to improve observation, intervention, and analytic data storage within agricultural work methods. This robot should be able to provide real- time video feed while it works, and be able to drive itself to user-inputted GPS coordinates.
A RC car, pictured on the right, was used because of its motor, its size, and the power associated with it. The best microcontroller is a Raspberry Pi. This device is a mini computer that can be programmed to do essentially anything, and is highly compatible with cameras, GPS, and motors. Everything is done within a $500 budget provided by our sponsor the MSU ECE Department.
Team Members (L-R): Jeff Walthers, Joe Schmitz, Nick Mirallegro, Wen Ni, Eric Testa, Sean Ellison
![]()
Instrumented Sensor Technology: Vibration Energy Harvester
 Instrumented Sensor Technology develops portable sensor devices that can monitor the vibrational environment of shipping vehicles. This information is used to ensure a certain standard when shipping products across the country. However, these devices have a limited operation life because they run on batteries. Batteries are an effective solution to supplying power to portable devices, but as power demands increase, batteries begin to fall short. Batteries are heavy, expensive, and require constant maintenance as they need to be changed every time they die.
Instrumented Sensor Technology develops portable sensor devices that can monitor the vibrational environment of shipping vehicles. This information is used to ensure a certain standard when shipping products across the country. However, these devices have a limited operation life because they run on batteries. Batteries are an effective solution to supplying power to portable devices, but as power demands increase, batteries begin to fall short. Batteries are heavy, expensive, and require constant maintenance as they need to be changed every time they die.
Our project is to develop a device that can harvest vibrational energy present in the shipping vehicles where IST’s portable sensor devices are implemented and convert this mechanical energy into electrical power to supply these devices. The ultimate goal is to prolong the battery life of these devices beyond their current lifetime or remove the need for batteries all together.
To do this we plan on harvesting the vibrational energy using an electromagnetic coil. Vibrations in the body of the shipping vehicle can be transferred to a magnet that passes through a coil. This will induce a current in the coil and provide a voltage swing which can be collected into a rechargeable cell.

Team Members (L-R): Stephen Pliska, Jovanni Ivanaj, Andrew Schroeder, Tom Dochoda, Daniel Fresneda-Rojas
![]()
MSU Voice Biomechanics Lab: Classroom Noise Monitor
The growing interest in the research of classroom acoustics is due to the effect that excessive noise levels can have on the cognitive development of young children. Both excessive noise and room reverberation negatively affect speech intelligibility in a classroom as well as the teacher’s voice capabilities.
 The goal of classroom noise monitor is to help students learn how to control their voices in the classroom. The monitor will measure the noise of the both teacher and students in the classroom by taking a reading from two microphones. One will be on the teacher’s body, while the other will remain mounted on a wall or on the ceiling. The students will then get a reminder by the classroom noise monitor based on their noise level. This reminder will come to the students as colors on a traffic light: green for good, yellow for getting too high, and red for way too loud. This will hopefully help teachers keep their voices vibrant by not talking over the children all day.
The goal of classroom noise monitor is to help students learn how to control their voices in the classroom. The monitor will measure the noise of the both teacher and students in the classroom by taking a reading from two microphones. One will be on the teacher’s body, while the other will remain mounted on a wall or on the ceiling. The students will then get a reminder by the classroom noise monitor based on their noise level. This reminder will come to the students as colors on a traffic light: green for good, yellow for getting too high, and red for way too loud. This will hopefully help teachers keep their voices vibrant by not talking over the children all day.
The device proposed would achieve all of this by measuring the noise of the children and the voice of the teacher by means of sound pressure levels. Using voice segmentation, the microcontroller on the circuit will compute moments when the teacher is pausing between words, and use that pause to take a sample from the classroom microphone. The samples will be used to determine the noise level of the classroom during the teacher’s pause and output the according action.

Team Members (L-R): Michael Vitale, Daniel Lau, Abdullah Alsaadan, Haiyang Hong, Yijun Yao
![]()
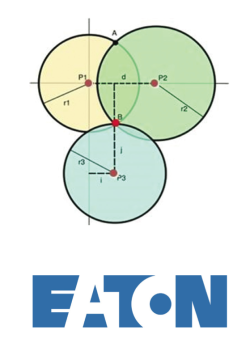
Eaton Corporation: Accurate Position Measurement System
Eaton Corporation is a multinational power management company that provides solutions to customers in managing electrical, hydraulic and mechanical power efficiently, safely and sustainably. Eaton Corporation needs a reliable way of determining the position of a truck from a pre- determined location within a truck loading bay.
 Current position measurement products that operate with the degree of accuracy required by Eaton Corporation are very expensive and are often limited to military usage. Our team is developing a product that can detect the relative position between two objects using electromagnetic waves. The product will first determine the distance between the two objects by sending and receiving electromagnetic waves. The product will use three distance measurements in a form of triangulation to determine the position of the objects from one another.
Current position measurement products that operate with the degree of accuracy required by Eaton Corporation are very expensive and are often limited to military usage. Our team is developing a product that can detect the relative position between two objects using electromagnetic waves. The product will first determine the distance between the two objects by sending and receiving electromagnetic waves. The product will use three distance measurements in a form of triangulation to determine the position of the objects from one another.
The product will then be placed within a predetermined location within a truck loading bay and within a truck. As the truck enters the truck loading bay, the product will calculate and display the relative positon between this predetermined location and the truck to a human supervisor overseeing operations within the truck loading bay.
Team Members (L-R): Kun Qian, Zixiao Yu, Erik Juziuk, Miao Yu
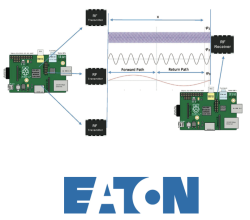
Eaton Corporation: Localization System
Eaton is a power management company with 2015 sales of $20.9 billion. Eaton has approximately 97,000 employees and sells products to customers in more than 175 countries. Eaton has an automotive division focused on commercial vehicle development, and the automotive segment produces products such as superchargers, engine valves, valve train components, cylinder heads, locking and limited-slip differentials, fuel, emissions, safety controls, transmission and engine controls, spoilers, exterior moldings, plastic components, and fluid connectors. For our project, Eaton wishes to deploy a low-cost localization system that can be easily integrated into commercial vehicle docking areas. Trucks will know precisely where their trailer tail is in relation to a known docking platform.
 Ultra Wideband (UWB) technologies have become increasingly popular for developing a relatively accurate localization system with an error rate of 10 centimeters. Design Team 13 is working to create an application specific localization system using UWB that at production will cost less than $50.00. The accuracy is desired to be under 10 centimeters and able to localize a 100-meter area. UWB uses nanosecond pulses and a wideband frequency coverage which maintains accuracy without line-of-sight.
Ultra Wideband (UWB) technologies have become increasingly popular for developing a relatively accurate localization system with an error rate of 10 centimeters. Design Team 13 is working to create an application specific localization system using UWB that at production will cost less than $50.00. The accuracy is desired to be under 10 centimeters and able to localize a 100-meter area. UWB uses nanosecond pulses and a wideband frequency coverage which maintains accuracy without line-of-sight.
Five UWB enabled transceivers and a multi-lateration technique allow us to develop an accurate and reliable location system. Once the localization functionality is established, the team will carry out testing to measure accuracy of the system and validate functionality outside and inside buildings with vehicles and building walls blocking line-of-sight.
Team Members (L-R): Chris Huber, Caelan Fields, Hanqing Wang, David Gilbert, Zihao Wang
![]()
MotionControlShop.com: Intellimotor
 Until 2015 there was a patent held by Animatics (Moog) that prevented manufacturers from integrating a closed loop controller/driver with a brushless motor. Since the patent expired, there have been multiple other manufacturers that have entered the market, but their solutions are often overly expensive and occupy too much space. The enclosures for the driver, controller, and encoder are much larger than the diameter of the motor, and their use of fragile optical encoders increases the amount of packaging needed on an already irregularly shaped device.
Until 2015 there was a patent held by Animatics (Moog) that prevented manufacturers from integrating a closed loop controller/driver with a brushless motor. Since the patent expired, there have been multiple other manufacturers that have entered the market, but their solutions are often overly expensive and occupy too much space. The enclosures for the driver, controller, and encoder are much larger than the diameter of the motor, and their use of fragile optical encoders increases the amount of packaging needed on an already irregularly shaped device.
In industrial applications, it is common for dozens of motors to be located in hard to reach places, which makes updating firmware and altering code tedious and time consuming. On top of this, USB connections have been known to cause ground loop and level shift hazards, which can damage the motor systems.
To improve current designs, Team 15 created the IntelliMotor; a motor that is compact in size, and utilizes a Virtual Human Machine Interface in the form of an Android application. By using Bluetooth to eliminate wired communication, we improved safety and ease- of-use. The PCB receives datagrams from the vHMI and forwards signals to the driver board. In tandem with the PCB, Team 15 created an Android app that sends datagrams via Bluetooth and saves scripts to the cloud.

Team Members (L-R): Joe Stephan, Chans Head, Angelica Minissale, Theo Chupp, Barend Ungrodt
![]()
Student Developed Project: Non-contact Temperature Sensor for the iPhone
Not many advances in temperature measuring technology have been made in the medical field since the invention of the mercury thermometer. There is an infrared temperature measurement gun found in industrial settings, but these devices are not accurate enough to be used for body temperature. The instant in-ear thermometer is the most common medical temperature device; however, this is contact-based and does not utilize a means to store temperature results.
 Therefore, the goal of this project is to design a device to reduce contact with the potentially sick and create a storage space for test results. The device will trade some of the features common among commercial and industrial grade non-contact temperature sensors for a less costly device in terms of materials and power consumption.
Therefore, the goal of this project is to design a device to reduce contact with the potentially sick and create a storage space for test results. The device will trade some of the features common among commercial and industrial grade non-contact temperature sensors for a less costly device in terms of materials and power consumption.
The project applications focus on Personal Health and Wellness, and improving medical tools for clinics. Keeping a personal record aids with providing a complete and accurate summary of an individual’s medical history. Data from these electronic devices can be collected from a smartphone and shared with medical institutions and hospitals worldwide. This grants patients access to a wide range of health information sources, the best medical practices, and health knowledge.
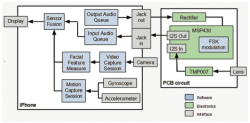
The system consists of a temperature sensing circuit that includes a microcontroller and temperature sensor. The circuit interfaces with an iPhone and a mobile application for processing the data and communicating with the network.
Team Members (L-R): Michael Vitale, Daniel Lau, Abdullah Alsaadan, Haiyang Hong, Yijun Yao
![]()