Electrical Engineering
Projects
Electrical and Computer Engineering ECE 480 Senior Design is required of all electrical and computer engineering majors at MSU.
For information on becoming a project sponsor, please contact Gregg Motter.
The following are the project sponsors and projects for the spring of 2012:
Tanzania Humanitatrian Project: GSM Data Link for Satellite Control
 Our team, in cooperation with the Telecommunications department, has designed a remote access Internet system that we will also be installing in Mto wa Mbu. Tanzania. MSU has been involved in a development project bringing computers and Internet access to schools in Tanzania for the past four years and has contributed greatly to the quality of education opportunities in Africa. The major issue that our project is to address is Internet availability and power management.
Our team, in cooperation with the Telecommunications department, has designed a remote access Internet system that we will also be installing in Mto wa Mbu. Tanzania. MSU has been involved in a development project bringing computers and Internet access to schools in Tanzania for the past four years and has contributed greatly to the quality of education opportunities in Africa. The major issue that our project is to address is Internet availability and power management.
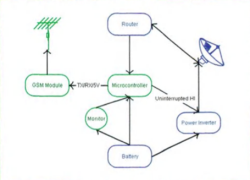 Our system is designed to supply Internet access to multiple rural schools in Tanzania. These schools have various limitations which include power restrictions due to solar-powered batteries. To overcome these limitations, we have created a system that can allow for on-demand Internet access. By using the Global System for Mobile Communications (GSM) standard we can reliably signal the remote satellite Internet system to power on.
Our system is designed to supply Internet access to multiple rural schools in Tanzania. These schools have various limitations which include power restrictions due to solar-powered batteries. To overcome these limitations, we have created a system that can allow for on-demand Internet access. By using the Global System for Mobile Communications (GSM) standard we can reliably signal the remote satellite Internet system to power on.
Included within our system is a microcontroller, a GSM module, a battery monitoring system, and an Internet monitoring system. Together these components actively provide an Internet on-demand system while also monitoring the health of components within the system. These systems are vital to improving the longevity of the Internet system currently in operation in Mto wa Mbu.
![]()
Texas Instruments: Wireless Sensing System for Intelligent Concrete Curing
 The concrete curing process is a complicated process that involves many variables. Improperly cured concrete can be exceptionally fragile. Our team has removed the uncertainty of the process by developing an embedded sensor system that
The concrete curing process is a complicated process that involves many variables. Improperly cured concrete can be exceptionally fragile. Our team has removed the uncertainty of the process by developing an embedded sensor system that
reports the temperature and moisture content of the wet concrete. These two parameters provide the user with the data necessary to make a more precise decision on when the concrete has cured.
 The system provides a demonstration of Texas Instrument’s MAVRK prototyping platform. The sensor and pMAVRK. modules create a single, compact unit that can be placed directly in the concrete. Our sensor module contains the temperature and moisture sensors along with the necessary signal amplification and conditioning. These signals are sent to the pMAVRK. module where they are converted to digital signals and sent to the MAVRK. motherboard via RF transmission. The MAVRK routes the data to a PC which displays the data with a user-friendly GUI.
The system provides a demonstration of Texas Instrument’s MAVRK prototyping platform. The sensor and pMAVRK. modules create a single, compact unit that can be placed directly in the concrete. Our sensor module contains the temperature and moisture sensors along with the necessary signal amplification and conditioning. These signals are sent to the pMAVRK. module where they are converted to digital signals and sent to the MAVRK. motherboard via RF transmission. The MAVRK routes the data to a PC which displays the data with a user-friendly GUI.
The combination of temperature and moisture sensing with wireless data transmission is a solution which is currently unavailable for purchase. Implementation of this system can save the user time and money by preventing weak, improperly cured concrete or allowing the project to move forward if curing occurs quickly.
![]()
Air Force Research Laboratory: Android Enabled Programmable Camera Positioning System
 Design Team 3 was tasked with developing an Android enabled GPS-based camera positioning system for the Air Force Research Laboratory (AFRL). The AFRL will use this system to automate the positioning of an infrared camera to perform field testing of infrared imaging technology and processing algorithms. Automated motorized mounts similar to
Design Team 3 was tasked with developing an Android enabled GPS-based camera positioning system for the Air Force Research Laboratory (AFRL). The AFRL will use this system to automate the positioning of an infrared camera to perform field testing of infrared imaging technology and processing algorithms. Automated motorized mounts similar to
this are already used for surveillance cameras and telescope systems; however these systems typically do not have a built-in GPS receiver and require that data be entered manually. This project was designed to produce a low-cost, off-the-shelf solution by utilizing the sensory and computation capabilities
of an Android smartphone.
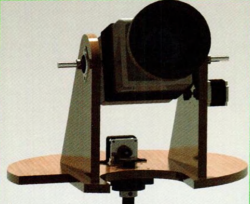 This project entailed constructing the motorized camera mount for a 19 pound infrared camera that is capable of being controlled by an Android smartphone. We also developed software for the phone’s location awareness and target acquisition as well as a camera control program to be run on an external laptop. The developed system is able to point with high accuracy at any targeted GPS coordinate (latitude, longitude, and altitude) on a pre programmed script. In order to do this, the system detects its own location and orientation and then calculates the necessary orientation so that the infrared camera focuses on its target location by issuing controls to the motors on the mount. The phone then signals the camera to capture an image and takes one itself as context imagery.
This project entailed constructing the motorized camera mount for a 19 pound infrared camera that is capable of being controlled by an Android smartphone. We also developed software for the phone’s location awareness and target acquisition as well as a camera control program to be run on an external laptop. The developed system is able to point with high accuracy at any targeted GPS coordinate (latitude, longitude, and altitude) on a pre programmed script. In order to do this, the system detects its own location and orientation and then calculates the necessary orientation so that the infrared camera focuses on its target location by issuing controls to the motors on the mount. The phone then signals the camera to capture an image and takes one itself as context imagery.
![]()
Air Force Research Laboratory: A Minimal Size, Weight, and Power System for Key Length Value Metadata Generation for Remotely Piloted Vehicle Sensors
 Our project is focused on improving the functionality of an RPV designed to fly over forest fires and record video. Current technology does not enable the video, attitude, and location data to be synchronized. Also, the orientation and location data are not associated with the sensor gathering the video, but instead with the RPV itself. The goal of our project is to resolve these problems by attaching an enclosure containing sensors and a computer-on-module (COM) to the RPV’s camera.
Our project is focused on improving the functionality of an RPV designed to fly over forest fires and record video. Current technology does not enable the video, attitude, and location data to be synchronized. Also, the orientation and location data are not associated with the sensor gathering the video, but instead with the RPV itself. The goal of our project is to resolve these problems by attaching an enclosure containing sensors and a computer-on-module (COM) to the RPV’s camera.
The enclosure contains a GPS unit, an Inertial Measurement Unit (IMU), and a COM. The
system collects and outputs thelocation and orientation data o f the camera. The location and orientation data is output in a standard format and synchronized with the video frames. The team has developed the system to be compact, lightweight, and low power, because all of these aspects are important for RPVs.
![]()
Lincoln Laboratory: Interactive Radar Demonstration for Children
![]() Massachusetts Institute of Technology Lincoln Laboratory (MULL) developed a kit to demonstrate radar system principles utilizing affordable, off-the- shelf parts and a simple, easy-to-understand design. MITLL’s kit is designed for use with a laptop as the processing unit. To extract the desired information from the radar output signal, it must undergo a user-facilitated processing sequence, and the data thus cannot be displayed in real time. Our project goal is to automate signal interpretation and to display target range and speed in real time. The radar screen appeals to children by generating interactive, visually- stimulating graphics.
Massachusetts Institute of Technology Lincoln Laboratory (MULL) developed a kit to demonstrate radar system principles utilizing affordable, off-the- shelf parts and a simple, easy-to-understand design. MITLL’s kit is designed for use with a laptop as the processing unit. To extract the desired information from the radar output signal, it must undergo a user-facilitated processing sequence, and the data thus cannot be displayed in real time. Our project goal is to automate signal interpretation and to display target range and speed in real time. The radar screen appeals to children by generating interactive, visually- stimulating graphics.
![]()
Robotic Hyena Project: Animatronic Hyena for Field Research in Kenya
 Our design team is working with Dr. Kay Holekamp of the Michigan State University Zoology Department to construct a robotic hyena that imitates the key characteristics of hyena body language. Currently, Dr. Holekamp uses a static model hyena to research wild hyenas’ initial responses to newcomers in their social hierarchy.
Our design team is working with Dr. Kay Holekamp of the Michigan State University Zoology Department to construct a robotic hyena that imitates the key characteristics of hyena body language. Currently, Dr. Holekamp uses a static model hyena to research wild hyenas’ initial responses to newcomers in their social hierarchy.
 The goal of this project is to incoiporate head, ear, and tail movement into the current hyena model, and allow wireless control of these movements from a distance. Hyenas use body language as a key indicator of their tendencies toward other hyenas – for instance, a hyena with its ears forward, tail up, and head forward is displaying an aggressive stance toward another hyena. Our robot is able to mimic hyena body language so that Dr. Holekamp may incite more realistic responses from hyenas in the wild.
The goal of this project is to incoiporate head, ear, and tail movement into the current hyena model, and allow wireless control of these movements from a distance. Hyenas use body language as a key indicator of their tendencies toward other hyenas – for instance, a hyena with its ears forward, tail up, and head forward is displaying an aggressive stance toward another hyena. Our robot is able to mimic hyena body language so that Dr. Holekamp may incite more realistic responses from hyenas in the wild.
The robot is controlled using an intuitive graphical user interface on a laptop computer, which sends serial communications wirelessly using the ZigBee protocol to an on-board Arduino processor. This processor controls the movement of the servo motors, which dictate the outward behavior of the robot. Head and ear movement are controlled by independent servo-and-gear systems, while the tail is controlled by varying wire tension within the flexible tail structure.
![]()
XG Sciences: Battery Cell Testing Chamber, an Accurate Control System
![]() When running tests on battery cells, temperature plays a large role in the results. Our design team was tasked by XG Sciences with modifying an existing environmental chamber to accurately control temperature for such tests.
When running tests on battery cells, temperature plays a large role in the results. Our design team was tasked by XG Sciences with modifying an existing environmental chamber to accurately control temperature for such tests.
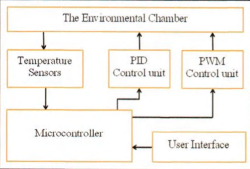 Our final design is based on two control principles, PID (proportional, integral, derivative) control and Pulse Width Modulation (PWM). By designing these two controllers we were able to achieve a high level of accuracy, as well as a highly stable temperature. The chamber can operate over a wide range of temperatures from -40°C to 85°C.
Our final design is based on two control principles, PID (proportional, integral, derivative) control and Pulse Width Modulation (PWM). By designing these two controllers we were able to achieve a high level of accuracy, as well as a highly stable temperature. The chamber can operate over a wide range of temperatures from -40°C to 85°C.
Our final design also incorporated an alarm system that triggers if the temperature deviates too far from its set point. All of these features were created with an external microcontroller development board. This allowed us to design a new’ control system without the need to rebuild the entire chamber.
![]()
Batelle: Remote Control and Monitoring of Sensors by Android Smartphone
 Currently, painful joint or musculoskeletal episodes are often misdiagnosed and treated empirically with clotting factor administration or for arthritis. Often the musculoskeletal pain is caused by hemophilia which causes internal bleeding in the joints. Timely and accurate diagnosis, along with appropriate management procedure, is critical to ensure best recovery for patients with hemophilia.
Currently, painful joint or musculoskeletal episodes are often misdiagnosed and treated empirically with clotting factor administration or for arthritis. Often the musculoskeletal pain is caused by hemophilia which causes internal bleeding in the joints. Timely and accurate diagnosis, along with appropriate management procedure, is critical to ensure best recovery for patients with hemophilia.
 Rapid Point of Care High Resolution Ultrasound scans are highly desirable in order to diagnose musculoskeletal pain due to hemophilia or due to other joint pathology. Telemedicine and mobile collaborations technology will allow healthcare professionals to timely and accurately diagnose musculoskeletal episodes and prescribe proper management procedures. This potentially can reduce the overall cost of medical care, as well as serve as a path for remote prescription verification and proper drug administration without the need of an outpatient visit.
Rapid Point of Care High Resolution Ultrasound scans are highly desirable in order to diagnose musculoskeletal pain due to hemophilia or due to other joint pathology. Telemedicine and mobile collaborations technology will allow healthcare professionals to timely and accurately diagnose musculoskeletal episodes and prescribe proper management procedures. This potentially can reduce the overall cost of medical care, as well as serve as a path for remote prescription verification and proper drug administration without the need of an outpatient visit.
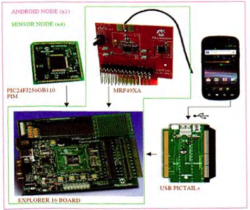
Our team is developing a system that will wirelessly transmit data from a portable ultrasound device through Wi-Fi to a base station in order to be examined by a physician or a specialist. The system accesses collected data from the ultrasound device after a patient has been scanned using the ultrasound probe. Next, it digitizes and filters the data through a microcontroller and transmits the data using an antenna. On the base station another microcontroller with a built-in antenna receives the signal and displays it on a laptop using commercial software.
![]()
ArcelorMittal: Blast Furnace Moisture Measurement Device
 The purpose of this project is to accurately measure the moisture content in a blast furnace pipe. Measuring six feet in diameter, the pipe travels from the blast furnace to boilers at a power station. Burning the exhaust gas from the blast furnace is an inexpensive alternative to natural gas. However, the gas contains moisture which corrodes the inside of the pipe. Understanding the moisture content enables proactive measures that can be taken to reduce the moisture content which prolongs the life of the pipe. The theoretical way of measuring the moisture in the pipe was non-intrusive using an ultrasonic device but was found to be inaccurate and expensive. Instead, the team was allowed to go intrusive and has designed and created a device that measures moisture accurately.
The purpose of this project is to accurately measure the moisture content in a blast furnace pipe. Measuring six feet in diameter, the pipe travels from the blast furnace to boilers at a power station. Burning the exhaust gas from the blast furnace is an inexpensive alternative to natural gas. However, the gas contains moisture which corrodes the inside of the pipe. Understanding the moisture content enables proactive measures that can be taken to reduce the moisture content which prolongs the life of the pipe. The theoretical way of measuring the moisture in the pipe was non-intrusive using an ultrasonic device but was found to be inaccurate and expensive. Instead, the team was allowed to go intrusive and has designed and created a device that measures moisture accurately.
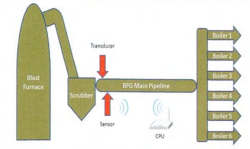 The device is composed of a capacitive sensor element which works in sync with a microcontroller to provide interval data measurements of the moisture or on command. Since the device can be inserted into an enclosure with pipe thread, it can be attached to any of the six intake lines. With this versatility, it doesn’t require the user to purchase six different devices unless simultaneous measuring is requested.
The device is composed of a capacitive sensor element which works in sync with a microcontroller to provide interval data measurements of the moisture or on command. Since the device can be inserted into an enclosure with pipe thread, it can be attached to any of the six intake lines. With this versatility, it doesn’t require the user to purchase six different devices unless simultaneous measuring is requested.
More than 95% of the unit resides outside of the pipe and communicates accurate data measurements of both temperature and humidity to the user. With this data, the end user can then adjust the gas levels in the pipe appropriately to reduce condensation.
![]()