Electrical and Computer Engineering ECE 480 Senior Design is required of all electrical and computer engineering majors at MSU.
The following were the project sponsors and projects for Fall 2019:
Aptiv: Advanced Analytics and Visualization on Time Series User Experience Data for Infotainment Services
 Aptiv is a Global Technology company headquartered in Dublin, Ireland. It employs over 6,400 engineers and scientists across 45 countries working in four major technical centers, as well as ten manufacturing sites and customer support centers. It has revenue exceeding $3.5 billion.
Aptiv is a Global Technology company headquartered in Dublin, Ireland. It employs over 6,400 engineers and scientists across 45 countries working in four major technical centers, as well as ten manufacturing sites and customer support centers. It has revenue exceeding $3.5 billion.
Analyzing infotainment data can be inconvenient because data must be collected from a port in each vehicle, which is a time-consuming process. Recent developments have made it more efficient for the vehicle to send data to a database using the cloud.
Our team was tasked with creating a database, a REST API, and a web platform. The goal is to have a working web application that analyzes and visualizes infotainment system data.

Team Members (L-R): Tyler Gasper, Kevin You, Stuart Oleinick, Mark Maroki, Jason Licata , Mehdi Kashef
![]()
MSU Bikes Service Center/RCPD: Intelligent Defense System: Hazard Detection and Collision Avoidance
 Throughout the world, cycling and walking are some of the most common methods of transportation today. In 2013 in the United States, 4,735 pedestrians were killed in traffic accidents and people with disabilities suffered a higher chance of injury. Again, in the US, in 2015, there were 818 fatalities and 45,000 injuries involving cyclists and automotive vehicles. The goal of the HDCAS is to reduce the number of cyclist and pedestrian injuries and fatalities using a radar-based detection system. We seek to provide an affordable, effective, and durable solution to enable bicyclists and pedestrians to improve their awareness of hazards and to reduce the risk of collisions.
Throughout the world, cycling and walking are some of the most common methods of transportation today. In 2013 in the United States, 4,735 pedestrians were killed in traffic accidents and people with disabilities suffered a higher chance of injury. Again, in the US, in 2015, there were 818 fatalities and 45,000 injuries involving cyclists and automotive vehicles. The goal of the HDCAS is to reduce the number of cyclist and pedestrian injuries and fatalities using a radar-based detection system. We seek to provide an affordable, effective, and durable solution to enable bicyclists and pedestrians to improve their awareness of hazards and to reduce the risk of collisions.
Our team was tasked with designing a system that detects hazards, such as vehicles, approaching from behind. Continuing the success of last semester’s team, we worked on a system which is comprised of a radar sensor and microcontroller with a Bluetooth Low Energy (BLE) interface to a phone application to alert the user of incoming hazards. The oncoming vehicle will be alerted through a series of lights and sound connected via a jack from the main sensor and controller.

Team Members (L-R): Ziyu Lin, Boyu Peng, Parker Dodson, Alec Russell, Emanuel Costa, Scott Bingham
![]()
MSU Resource Center for Persons with Disabilities: Jungle Power Pod: A Photovoltaic Battery-Powered System for Common Portable Electronic Devices
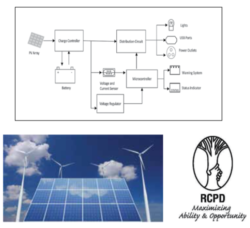 An estimated 16% of the world’s population has little or no access to electricity. The majority of this population resides in developing nations. Solar power systems have become increasingly popular in recent years due to the growing demand for reliable energy. However, the present method for utilizing solar power in off-grid applications has high initial cost, limited energy storage, and lacks robust electrical and mechanical designs.
An estimated 16% of the world’s population has little or no access to electricity. The majority of this population resides in developing nations. Solar power systems have become increasingly popular in recent years due to the growing demand for reliable energy. However, the present method for utilizing solar power in off-grid applications has high initial cost, limited energy storage, and lacks robust electrical and mechanical designs.
Our team is tasked to design, develop, and test a low- cost, photovoltaic battery-powered charging system for small electronic devices for use in hospital rooms at the Bombardopolis Health Center, Haiti and the surrounding households.
The wall mountable, portable and compact design solution includes common USB, coaxial, and cigarette charging ports. The design will be easily mass producible which can provide scalable business opportunity for individuals in low income third world settings. It is comprised of a microcontroller-based monitoring and warning system to display energy consumption, warn the user when units consumed fall below a predetermined value, and automatically shut down the system at the critical consumption limit. The user interface will be accessible to visually and hearing impaired persons. Through this proposed design, users will get an affordable power system capable of charging multiple devices

Team Members (L-R): Kerima Musanovic, Vaughn Holmes, Will Briggs, Brendan Czarnecki, Madison Carriere, Panashe Mayangamutse
![]()
Michigan State University: Robotic Crop Weeder
 Weeding is a time-consuming and labor-intensive task for farmers. An autonomous weeding machine is proposed to help alleviate this.
Weeding is a time-consuming and labor-intensive task for farmers. An autonomous weeding machine is proposed to help alleviate this.
A prior Electrical Engineering capstone team installed a camera, built a manually powered cart, and implemented a robotic arm to uproot weeds.
Our team is continuing that work by enabling the cart to move, steer and be wirelessly controlled using a joystick. The cart must have a battery life of 30 minutes or greater, have a top speed of at least three mph and be able to be wirelessly controlled from 50 feet away.
Team Members (L-R): Ching-Ting Yeh, Mike Kutzleb, Eduardo Ramirez, Shulin Xiang, Marcel Meijer
![]()
MSU Rocketry Club: Rocket Elevation Control
 MSU Rocketry Club is building a student researched and designed hybrid-fuel motor to compete in the 2019 Spaceport America Cup. The object of the competition is to launch a rocket carrying a 10-pound payload to an altitude of 10,000 feet. The team with the highest accuracy wins.
MSU Rocketry Club is building a student researched and designed hybrid-fuel motor to compete in the 2019 Spaceport America Cup. The object of the competition is to launch a rocket carrying a 10-pound payload to an altitude of 10,000 feet. The team with the highest accuracy wins.
The rocket motor has a combustion chamber and an oxidizer tank. The SA cup rules require our team to remotely fill the oxidizer tank, disconnect the fuel hose, and drain the oxidizer tank. We will also need to achieve maximum precision of the rocket’s altitude. For this, it is desirable to have a controlled cutoff of the oxidizer flow into the combustion chamber. This will extinguish combustion, halting thrust and resulting in the slowing of the rocket as it approaches apogee.
Our team must design and build a mechanism for remotely filling, disconnecting, and draining the oxidizer tank from an external port. To control rocket elevation, a flight computer must continually read measurements on altitude, tilt, acceleration, and atmospheric pressure, and use this data to derive a trajectory curve given its current state. If the maximum of the curve is near 10,000 feet, it will close the valve to halt thrust. We must be able to wirelessly control these processes at a distance of up to two miles.
Team Members (L-R): Robert Billette, Chandler Panetta, Shiva Eswaran, Tian Qin
![]()
MSU College of Engineering Intelligent Sensing & Mobile Systems Group: Voice Fitbit

Wearable fitness trackers, such as Fitbit, are devices capable fo monitoring the physical activity of the individual wearing it. Most of them are worn as a watch. These devices can monitor activity parameters such as heart rate, quality of sleep, steps taken, etc. These measurements can provide a good overview of the physical health of the individual wearing the device, and can notify the user of any abnormal or unhealthy patterns.
Our team was tasked to create a device that can detect human voice and then determine if the person speaking into the device is the one that is pre-programed into the device. The device will continuously run during the day to detect the user. The prototype will use machine learning algorithms and spectogram analysis to detect the human voice. This device will be wearable for day-to-day use.

Team Members (L-R): Edson Nascimento, Nicholas Pigott, Virang Patel, Jacob Fauer
![]()
MSU Nondestructive Evaluation Lab: Wireless Sensor Network for Water Quality Monitoring
 Wireless sensor network (WSN) refers to a group of spatially dispersed and dedicated sensors for monitoring and recording the physical conditions of the environment and organizing the collected data at a central location.
Wireless sensor network (WSN) refers to a group of spatially dispersed and dedicated sensors for monitoring and recording the physical conditions of the environment and organizing the collected data at a central location.
In recent years, more and more people have been affected by water pollution. The traditional method of measuring water quality is using the portable analysis devices need to be operated manually. However, these types of devices are unable to perform real-time monitoring and the collected data us difficult to transfer to other devices. Those limits make it inconvenient to measure the water quality accurately and efficiently.
Our team is working on developing a wireless sensor network which can monitor the real-time water quality. This device should be able to receive data from other sensors and display the water quality collected from different locations in real time. The sensors are connected to one. Arduino board, and signals are transmitted to PC through Wi-Fi. A program will be designed to control the data collection and signal transmission. Then software will be created to display and analyze the data. In addition, it will report an enormous variation in water quality.
Team Members (L-R): Yiwei Zhang, Zixin Guo, Xisu Chong, Zeyuan Cai, Pengzhan Wei
![]()
Michigan State University: Autonomous Snowblower
 Clearing snow from residential sidewalks and driveways can be hazardous and create potential safety and health risks, such as heart attacks, for homeowners.
Clearing snow from residential sidewalks and driveways can be hazardous and create potential safety and health risks, such as heart attacks, for homeowners.
To help alleviate this, our team worked to develop an aftermarket “kit,” which modifies an existing snowblower to make it autonomous, or controllable via tablet. We plan to add functionality to start and stop the engine, control the auger and chute, and initiate and halt forward motion. We will power this with a 12V battery that is recharged by a 14V alternator connected to the gas engine, and control it with a Radio Control system attached to an Arduino. Our project will have implications for future autonomous snowblowers.

Team Members (L-R): Mike Garcia, Charles Mao, Hamad Alhajeri, John Wurster
![]()
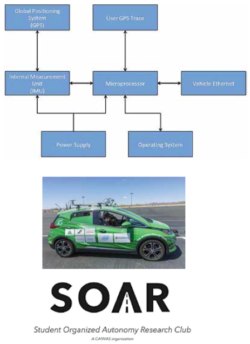
MSU CSANN Lab: Deep Neural Networks for Navigation Rovers for Sound/Image/Video Classification
 Advancements to deep neural networks and dedicated processing resources such as the NVIDIA Jetson TX2 GPU have greatly expanded the potential applications in real time image/video recognition, identification, tagging, navigation etc.
Advancements to deep neural networks and dedicated processing resources such as the NVIDIA Jetson TX2 GPU have greatly expanded the potential applications in real time image/video recognition, identification, tagging, navigation etc.
Our team was tasked with exploring a potential application of deep neural networks while being evaluated on real-time classification accuracy, execution speed, and power consumption expense. The goal of this project is to provide movement capability for the NVIDIA Jetson TX2 development board, so image/video recognition can be performed on the go. This allows our team to complete the two main objectives of following a person and scanning a room to find a specified object.
Our solution involves using the iRobot Create 2 and Robot Operating System (ROS) to provide movement capability based on sensor feedback. Meanwhile the NVIDIA Jetson TX2 will handle the processing for real time image/video recognition.

Team Members (L-R): Zoinul Choudhury, Weston Shellhorn, Jake Aprilliano, Jianan Ye, Josh Richter, Tejas Bharath
![]()
Fraunhofer: Measurement of Diamond Substrate Top Surface Shape
 Synthetic diamonds are desirable for applications in circuits due to their extremely high conductivity. The Fraunhofer CCD at MSU studies and improves upon creation processes for synthetic diamonds.
Synthetic diamonds are desirable for applications in circuits due to their extremely high conductivity. The Fraunhofer CCD at MSU studies and improves upon creation processes for synthetic diamonds.
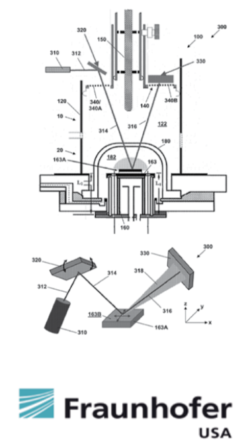
The process for growing diamonds involves depositing carbon atoms on an existing diamond called a substrate. Due to the random nature of the carbon atoms, it is possible that the atoms will not come to rest on the substrate in a crystalline form and a flaw will be created. This greatly decreases the value and utility of a diamond. These defects can be removed from the diamond if caught early enough. In order to detect the defects in sufficient time, there would need to be a method of observing the progress of the diamond as it is growing.
The proposed system to be used to observe the surface of the diamond is a laser to be reflected off of the surface of the growing diamond onto a detector which will measure the intensity of the laser. A constant intensity is a sign that the diamond is growing evenly without any problems. A decreasing intensity is a sign of roughness or other defects forming on the surface of the diamond due to their interference with the laser’s reflection.

Team Members (L-R): Christian Lydy, Chengxi Xie, Ethan Hendrickson, Paul Probst, Franklin Mackenzie
![]()
NASA/ASU: Neutral Flux Detector Probe
 Psyche is the name of a metal-rich asteroid orbiting the sun between Mars and Jupiter. The NASA Psyche Mission is planned to launch in 2022 and arrive at the asteroid in 2026. The objective of the mission is to view a previously unexplored object and look for building blocks of a terrestrial planet.
Psyche is the name of a metal-rich asteroid orbiting the sun between Mars and Jupiter. The NASA Psyche Mission is planned to launch in 2022 and arrive at the asteroid in 2026. The objective of the mission is to view a previously unexplored object and look for building blocks of a terrestrial planet.
The Neutral Flux Detector Project, which will be used to help with the Psyche Mission, is sponsored through NASA in collaboration with Arizona State University (ASU). The project objective for this semester is to continue the work performed by the MSU capstone students in the Fall semester, and it is a joint project with an MSU Mechanical Engineering capstone team.
The focus for this semester is to design, prototype, and calibrate the probe. The probe must be able to maneuver and measure the flux of neutrals inside NASA’s vacuum test facility. The probe will be utilized to assist the engineers at NASA and ASU in obtaining the true efficiency of the spacecraft’s thrusters while being tested. It is essential to know the thrusters’ true efficiency for accurate calculations of events and mission longevity. Psyche will be equipped with a set of Hall Effect Thrusters (HETs) in order to reach the asteroid. Since the journey is so far, the spacecraft will need a long-lasting energy supply, thus Psyche will utilize this type of solar- electric low thrust propulsion.
Team Members (L-R): Giancarlo Martinez, Alek Zutowski, Collin Germain, Zhen Liu
![]()
Niowave: Underwater Wireless Communication Sensor for Temperature
 Niowave, Inc. in Lansing, Michigan is a spin- off from Michigan State University dedicated to the production of medical radioisotopes, which include molybdenum-99, using high-power superconducting electron accelerators.
Niowave, Inc. in Lansing, Michigan is a spin- off from Michigan State University dedicated to the production of medical radioisotopes, which include molybdenum-99, using high-power superconducting electron accelerators.
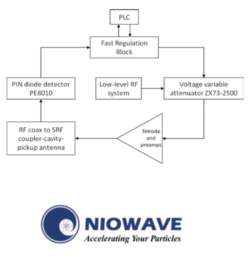
The behavior of an electron beam in an accelerator depends on its energy. Instabilities in the energy of the electron beam make the accelerator difficult to operate. Some of these fluctuations result in positive feedback – where loss of beam current results in a rise in electric field strength inside the cavity, which then causes further beam loss.
Our team’s objective is to design a controller that is fast enough to maintain stability in the energy of the electron beam. The controller will communicate to the voltage variable attenuator (VVA) that will throttle the power to handle the disturbances. The controller will be able to communicate to the operator via a programmable logic controller, which will allow for manual operation
Team Members (L-R): Joseph Bieke, Skyler Krathwohl, Fan Liu, Adrian Carrillo
![]()
Fraunhofer: Sound Emission Measurement – Diamond Polishing
 Michigan State University and the Fraunhofer Center have worked together to synthetically produce diamonds for use in electronics and advanced applications development.
Michigan State University and the Fraunhofer Center have worked together to synthetically produce diamonds for use in electronics and advanced applications development.
In order to more effectively polish these diamond substrates and remove small imperfections in the diamond surface, our team was tasked with creating a device that will be able to detect the quality of the diamond polishing occurring and notify the operator when optimal polishing levels are not sustained.
We must also determine the ranges of quality polishing and how to detect them utilizing a frequency spectrum.
Team Members (L-R): Anthony Cicala, Michael Herdzik, Brendan Murphy, Purnima Akkaraju, John Zhang, Sean Christie
![]()
Michigan State University: Design of a Dynamometer for Electric Bicycle Testing and Monitoring Trash Bins
 The fundamental challenge with hybrid vehicles is determining how much power to obtain from available sources to produce an efficient output while considering the dynamic environment. An electric bicycle represents this form of hybrid vehicle, where the sources of power are both electrical and mechanical. The electrical source being the motor and the pedals of the bike being the mechanical source. Environments experienced by the bicycle include uphill, downhill, and flat inclines. Therefore, the range of loads and speeds that the electric bicycle undergoes varies depending on the environment being considered. This proposal presents a constrained testing configuration using a dynamometer to investigate control and sensing strategies for the bicycle and motor controls, allowing the sources of power to interact smoothly over the full range of operating conditions. Along with the proposed configuration, detailed justifications and analysis are provided for all selected parts.
The fundamental challenge with hybrid vehicles is determining how much power to obtain from available sources to produce an efficient output while considering the dynamic environment. An electric bicycle represents this form of hybrid vehicle, where the sources of power are both electrical and mechanical. The electrical source being the motor and the pedals of the bike being the mechanical source. Environments experienced by the bicycle include uphill, downhill, and flat inclines. Therefore, the range of loads and speeds that the electric bicycle undergoes varies depending on the environment being considered. This proposal presents a constrained testing configuration using a dynamometer to investigate control and sensing strategies for the bicycle and motor controls, allowing the sources of power to interact smoothly over the full range of operating conditions. Along with the proposed configuration, detailed justifications and analysis are provided for all selected parts.
Team Members (L-R): Michael Moore, Dean Simonelli, Aishwarya Rao, Sandra Kue, Tim Pham, Tristan Salem
![]()