AMP Robotics / MSU Surplus Store & Recycling Center: Maximizing Use & Efficiency of Robotic Sorting
Fraunhofer Institute: Electrochemical Instrument for Sensor Miniaturization
GE Aviation: Large-Scale Testing of a Flight Management System Using a Cloud-Based Simulation Environment
General Motors: Autonomous Vehicle Fluid Level Sensor
General Motors: Autonomous Virtual Hardware In-the-Loop Project
General Motors: Machine Learning Technique for Automatic Thermal Seat Control
General Motors: Repurpose Fuel Injector Boost Supply To Stabilize ECU
Great Lakes Crystal Technologies: Thermal Imaging During Diamond Growth
MSU Department of Electrical & Computer Engineering: Aerial Drone for NDE Applications
MSU Department of Electrical & Computer Engineering: Detection of Buried Lead Water Pipes
MSU Department of Electrical & Computer Engineering: Diaper Monitoring System
MSU Department of Electrical & Computer Engineering: Miniature Self-Driving Car
MSU Department of Electrical & Computer Engineering: Vocal Enhancement Device
MSU Department of Electrical & Computer Engineering: Wearable Temperature Monitoring Device
MSU Solar Racing Team: Development of Electric Motor Vehicle Controller
MSU Solar Racing Team: Solar Car Battery Pack
MSU Solar Racing Team: Solar Car Vehicle Dashboard System
NASA: Solar System Communication Network Project
Texas Instruments: Video and mmWave Radar Data Capture System
AMP Robotics / MSU Surplus Store & Recycling Center: Maximizing Use & Efficiency of Robotic Sorting
As consumption of plastic packaged products grows, so does the importance of finding sustainable and effective ways to dispose of them. In 2006, MSU launched the “Be Spartan Green Environmental Stewardship Initiative” to help reduce the impact of waste on the environment. MSU is home to the Surplus Store & Recycling Center (SSRC) that processes between 20 to 25 million pounds of material annually, including between 8 and 9 million pounds of recycling material from MSU’s campus.
Recycling centers rely on the speed and accuracy of sorters to bale recyclables. Traditionally, the sorting was done by humans who would load and hand sort the line. More recently, with the rise of artificial intelligence cyber-physical systems, robotic sorters have been developed to surpass the speed in picks per minute of human sorters. Robotic sorting systems can nearly double the speeds achieved by human sorters. This increased speed directly correlates to an increase in profits for the facility and a decrease in risk to employees encountering sharp and toxic materials, such as broken glass, needles, and medications often found in recyclables.
The goal of this project can be broken down into three main objectives, each rooted in the prospect of reducing the number of employees interacting with the recyclable materials and increasing their effectiveness. First, this project aims to identify processes to optimize the use of the AMP robotic sorting system at the MSU Surplus Store & Recycling Center through increasing the number of picks per minute performed by the robot. Second, this project investigates the addition of a sensor to the Cortex system to identify the depth of the recyclables on the conveyor belt. Third, this work constructs additions to the chutes in which recyclable materials are sorted to reduce instances of spillover.


Michigan State University
Team Members (left to right)
Jarrett Blumke Alanson, Michigan
Sepehr Rahgozar Troy, Michigan
Jacob Honer Farmington Hills, Michigan
Austin Anthony Farmington Hills, Michigan
Katie Albus Livonia, Michigan
Sam Church Ann Arbor, Michigan
MSU Department of Electrical & Computer Engineering
Project Sponsors
Sean Barton East Lansing, Michigan
Amanda Marrs Louisville, Colorado
Dave Smith East Lansing, Michigan
Teaching Assistant
Dr. Daniel Morris
Fraunhofer Institute: Electrochemical Instrument for Sensor Miniaturization
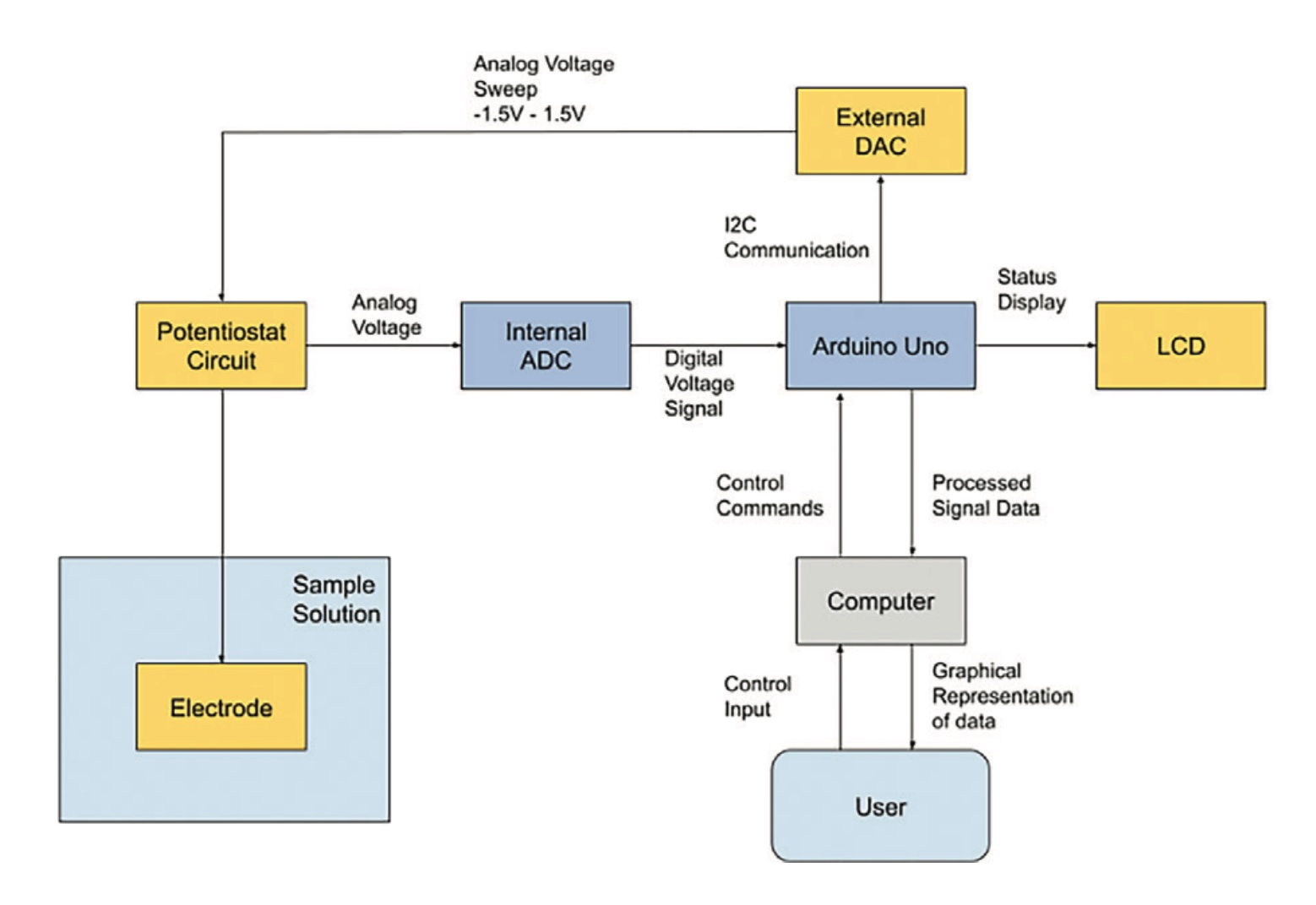
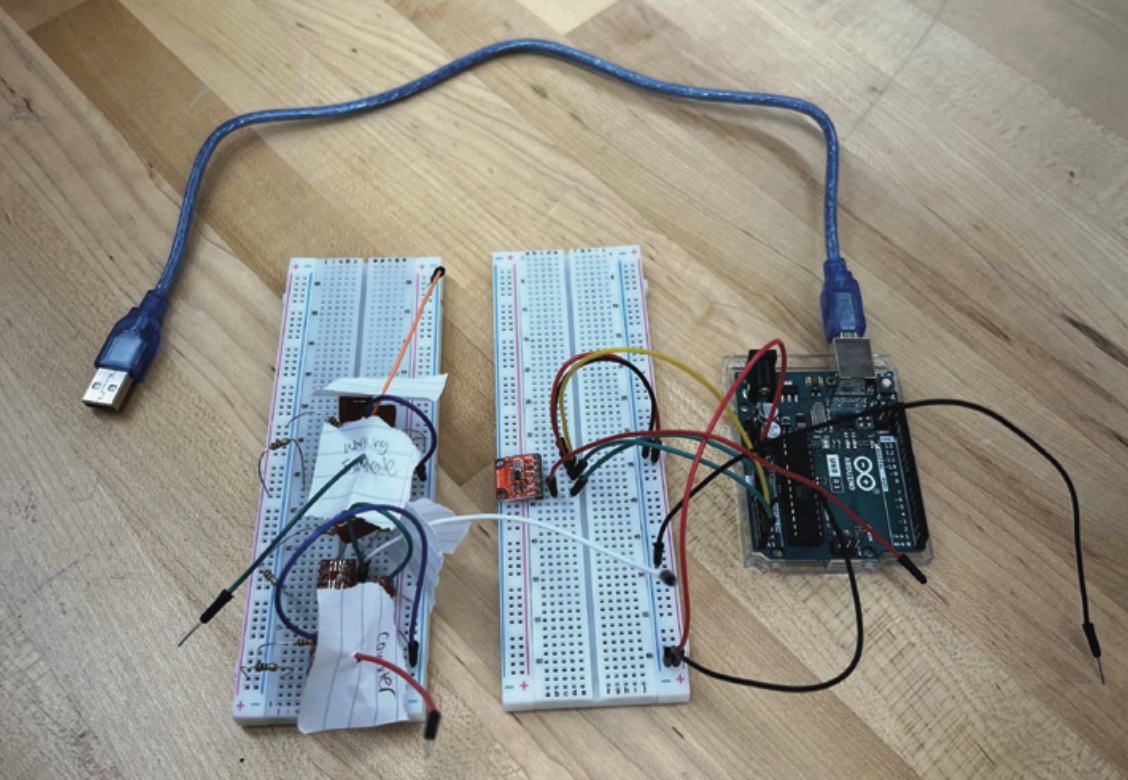
Fraunhofer USA Center Midwest is a research organization in East Lansing, Michigan that focuses on the development of coatings and diamond technologies. The headquarters of Fraunhofer USA are located in Plymouth, Michigan. The development of these technologies is useful for the electrodes in a variety of different applications involving electrochemistry. Electrochemical instrumentation is greatly useful for the analysis of particles such as heavy metals and viral particles in saliva. The analysis of these particles allows for better detection statistics using chemical measurements. Our aim for this design project is to create an affordable and integratable electrochemical instrument to detect lead in water.
Our design is based on using a potentiostat circuit that is connected to an electrode to monitor and measure samples of water for lead based on its signature response in cyclic voltammetry. Our design aims to be cheaper than current tests at our price range that are often one-time use and cannot be easily hooked up to software.
This design is aimed at a person or company who will be frequently testing their water, which is a different user than most miniaturized lead testing products that cater to testing drinking water. Most lead testing kits sold in stores are lead testing strips that are cheap but only one-time use. Other kits that people buy online get sent to a remote lab for testing and are also one-time use since you can only collect and send one sample. Our design will be a reusable device that will be aimed towards people or companies that need to test water for lead on a continuing basis. Removing the need to buy a new lead testing kit each time will be more practical and add up to savings over time for the consumer. Also, the cost of all the materials and components that make up this device is low, leading it to have a much lower life-cycle cost over existing products when used for ongoing testing.

Michigan State University
Team Members (left to right)
Kyle Garcia
Grand Rapids, Michigan
Ryan Daniel
Portage, Michigan
Shane Moir
Northville, Michigan
Nolan Ott
Ada, Michigan
Sabrina Herman
Grand Rapids, Michigan
Arlys Merucci
Bloomfield Hills, Michigan
Fraunhofer
Project Sponsors
James Seigenthaler East Lansing, Michigan
Teaching Assistant
Dr. John Albrecht
GE Aviation: Large-Scale Testing of a Flight Management System Using a Cloud-Based Simulation Environment
General Electric (GE) Aviation is the world leader in providing aircraft engines systems and avionics (aviation electronics). For the past two decades GE has made significant strides in advancing avionics beyond jet propulsion. In 2007 GE acquired Smiths Aerospace, this allowed GE to broaden its offerings by adding innovative flight management systems, electrical power management, mechanical actuation systems and airborne platform computing systems. Then in 2012 GE acquired Austin Digital, which revealed new ways for GE to use flight data analysis to optimize flight operations. This enabled GE to consolidate it, growing digital services into the single business GE Aviation in 2016.
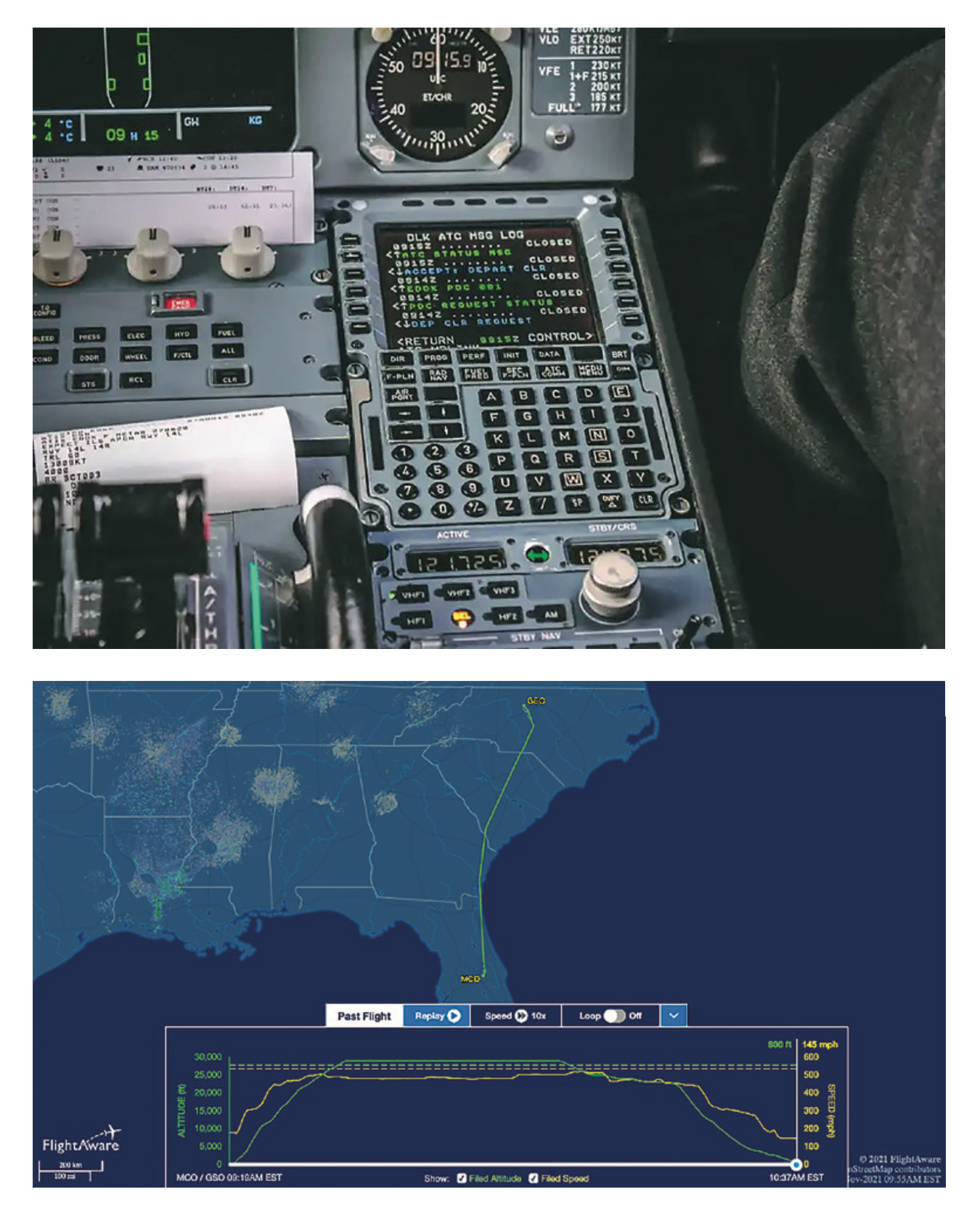
The Flight Management System (FMS) is the onboard avionics computer that flies the aircraft after the flight crew has entered the route, along with additional parameters. Essentially the FMS is a crucial part in one’s flight from when the plane takes off to when the plane lands. To avoid any in-service problems the FMS is constantly updated and extensively tested.
The main objective of this project is to create an environment that can execute flights on the FMS at a large scale in order to evaluate its constant updates. The data used to conduct these tests will be extracted from an online flight simulator “FlightAware.” FlightAware is an online flight simulation that tracks and collects data from flights; this data includes departure location, arrival location, route taken, speed, altitude, and distance. For this project the team goal is to be able to extract multiple flights’ data from FlightAware, then use a scripting language to create inputs for the FMS. The FMS will simulate a large number of flights, while being monitored for any exceptions or errors that might arise.
Michigan State University
Team Members (left to right)
Mitchell Crane
Rockford, Michigan
Rujuta Karanjikar
Mumbai, India
Nick Chapin
Lansing, Michigan
Nick Krause
DeWitt, Michigan
Dominick Campbell
Birmingham, Michigan
GE Aviation
Project Sponsors
John Hadley
Grand Rapids, Michigan
Joachim Hochwarth
Grand Rapids, Michigan
Project Facilitator
Dr. Shaunak Bopardikar
General Motors: Autonomous Vehicle Fluid Level Sensor
General Motors, founded in 1908, is one of the largest automobile manufacturers based in the United States and among the largest internationally. With the age of self-driving autonomous vehicles on the horizon, General Motors has been advancing into the next generation of self- driving vehicles.
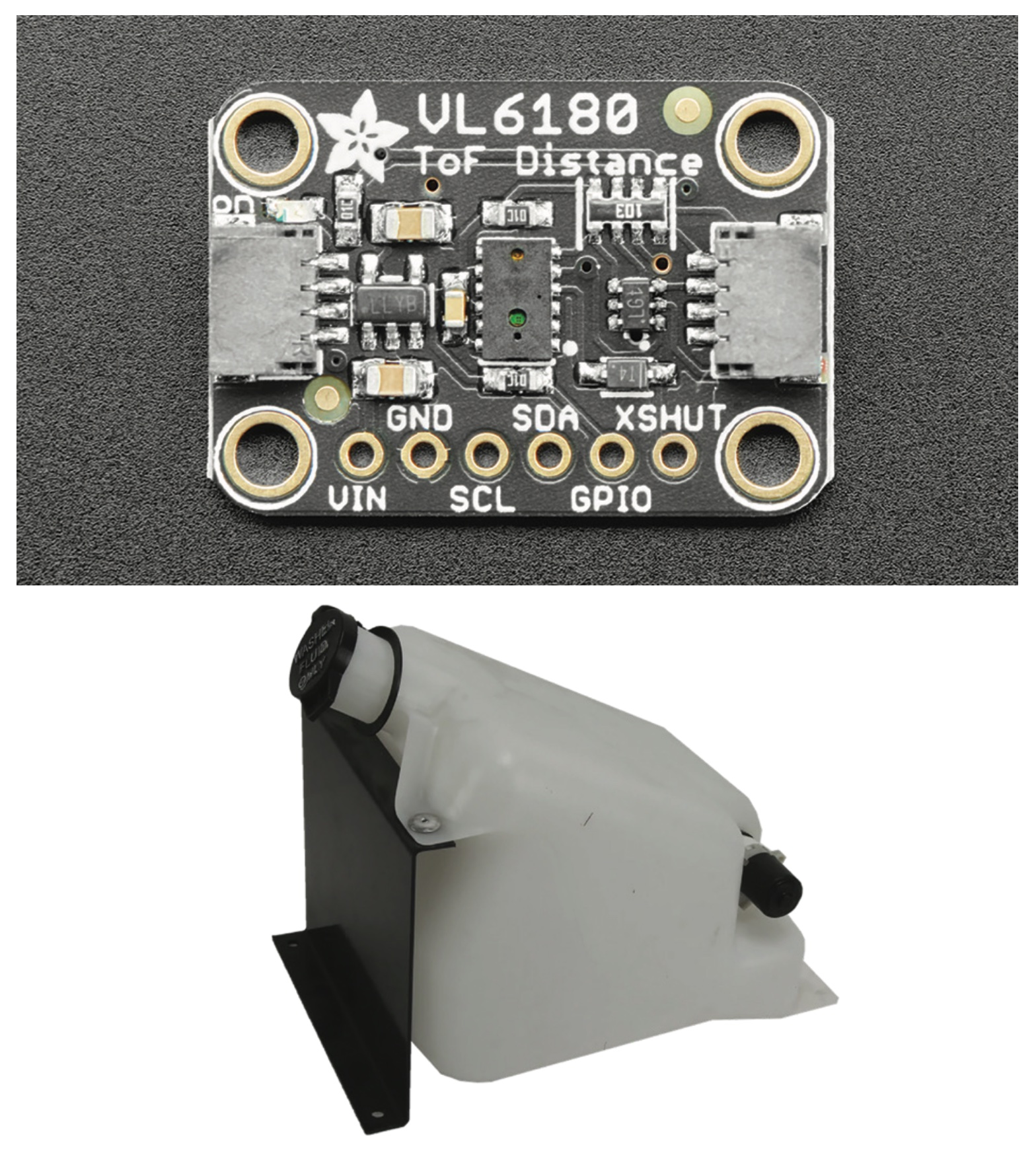
Our team was tasked with designing an apparatus for continuous and accurate measurement of the washer fluid level in the reservoir. For autonomous vehicle applications, knowing the current fluid level without manually checking a fleet of them is critical. Windshield washer fluid is not only used for cleaning the windshield, but keeping camera and sensor arrays clean from dirt, salt, road and other organic debris. It is crucial that the autonomous vehicle must understand and plan for washer fluid usage to better predict future outcomes.
The end goal is to be able to report the remaining percentage of fluid level within 1% (99, 98, 97…%). The sensor must be low cost and available off the shelf. It needs to be durable, accurate, and able to survive the vibrations from the road. It should be able to work while the vehicle is moving, and not wear down or corrode over time. The sensor we will integrate will use a time-of-flight LiDAR sensor to measure the fluid capacity.


Michigan State University
Team Members (left to right)
Andrew Mackoul
Lansing, Michigan
Jeremy Molargik
Howell, Michigan
Ishmael Fasina
Ypsilanti, Michigan
Luke Lewallen
Macomb, Michigan
Alex Jones
Detroit, Michigan
General Motors
Project Sponsors
Nate Newth Warren, Michigan
Project Facilitator
Dr. Sergey Baryshev
General Motors: Autonomous Virtual Hardware In-the-Loop Project
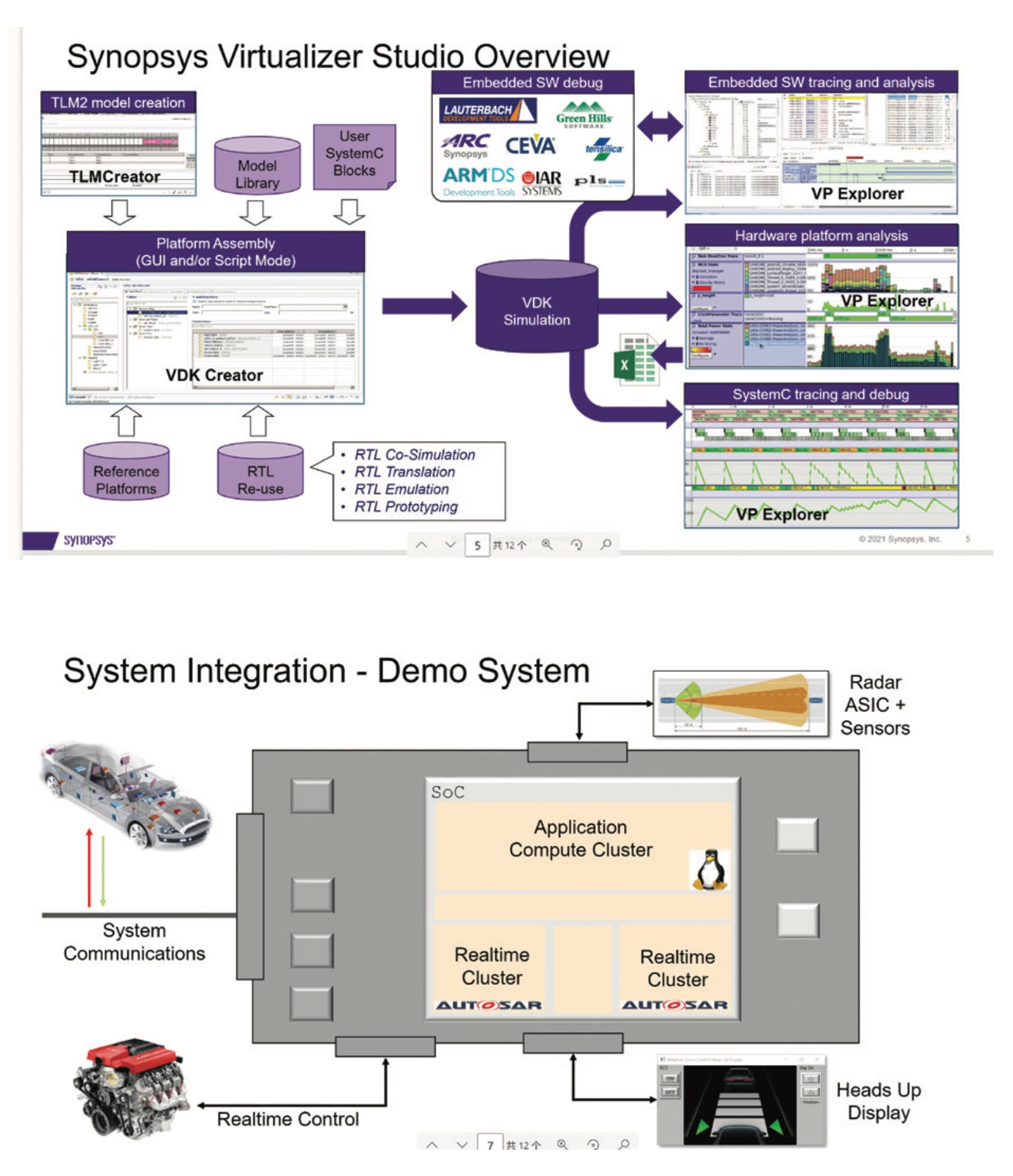
General Motors’ (GM) autonomous driving division has been advancing the next generation of self-driving vehicles through fast-to-market simulation and machine learning approaches. The project will aim at creating a virtual hardware in-the-loop (VHiL) simulator to enable the VHiL team to code, run, and test software without using their hardware rack. The project lead should be familiar with software coding, distributed system testing, and hardware compute architectures. This project will reduce the development time needed to improve GM’s autonomous driving features. It will also enable the software team to test their code faster and reduce the hardware dependency required for automated driving distributed architecture.
In the past couple of years, there has been a huge growth in the market for autonomous driving. GM’s newly created VHiL team will work closely with the MSU team to develop and test a virtual Electronic Control Unit (ECU) for their autonomous vehicles. The MSU team will be training together with their new hires on using their development kits and test platforms. Furthermore, the virtual ECU will be tested for correct behavior and the data collected will be used to visualize the output.
Additionally, the project team is tasked with building an interface that could simulate camera and LiDAR traffic input that is applicable for ACP 3 & 4. The Virtualizer Development Kits (VDK) from Synopsys will be used to achieve this objective. The VDK provides a fully functional model of system executing target code. The Synopsys Virtual Prototyping converts the raw data into richer, more descriptive information, which can be visualized in real time. Consequently, the developer could then directly use those higher-level perceptual outputs which include object classification, velocity measurement, semantic scene segmentation, and obstacle detection.
Michigan State University
Team Members (left to right)
Joshua Jennings Detroit, Michigan
Drew Hooker East Lansing, Michigan
Sam Polus Warren, Michigan
Yifei Li Zhengjiang, Jiangsu, China
Zhongren Xu Xiangyang, Hubei, China
General Motors
Project Sponsors
Paul Demshur Warren, Michigan
Frederic Hannert Warren, Michigan
Prakash Ranjan Sahay Warren, Michigan
Project Facilitator
Dr. Jian Ren
General Motors: Machine Learning Technique for Automatic Thermal Seat Control
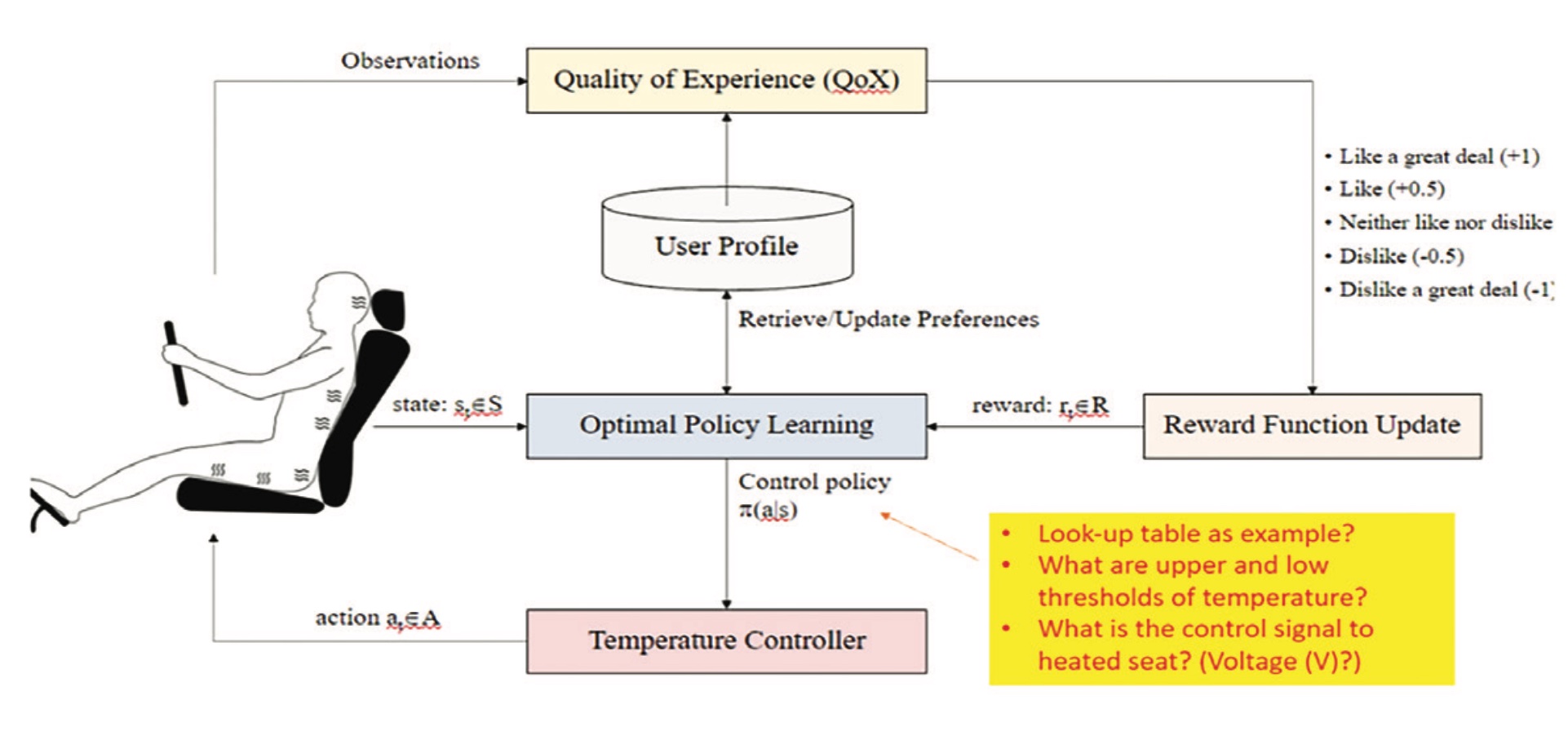
Thermal seats with heat and ventilation are becoming more common in today’s vehicles. These are typically controlled automatically by an onboard electronic controller based on thermal conditions outside the vehicle and inside the passenger cabin. General Motors’ current thermal automatic seat control does not meet their customer satisfaction criteria. In order to reach this standard, a machine learning protocol must be implemented within the closed loop feedback control system to adjust user setting changes under a set of conditions. When the learning for a given condition is complete, the baseline calibration value will be adjusted such that the automatic control will start to move away from the baseline to more personalized controls. Given occasional variations such as high metabolism, emotional behavior changes, etc. are unavoidable, learning can be continuous, but the maturation of learning will be robust enough to filter out occasional variations. The direct heat addition and extraction by the thermal seat will also improve efficiency at the occupant’s thermal conditioning more than the indirect climate control system. As a result, adapting the automatic control of thermal seats to user preferences will boost customer satisfaction and overall battery health.

Michigan State University
Team Members (left to right)
Suyailim Nahin
Roseville, Michigan
Ghazi Rizvi
Troy, Michigan
Hyunmin Choi
Seoul, Korea
Zachary Grycza
Clarkston, Michigan
Jonathon Robb
Oxford, Michigan
General Motors
Project Sponsors
Rupesh Kakade
Warren, Michigan
Project Facilitator
Dr. Mi Zhang
General Motors: Repurpose Fuel Injector Boost Supply To Stabilize ECU
Since 1908 General Motors has worked to design and manufacture exemplary automobiles for millions of customers around the world. With 155,000+ employees across 22 time zones, General Motors plans to create a world with no crashes, no emissions, and no traffic, one step at a time. A major step in that plan is vehicle efficiency and the optimization of fuel use.
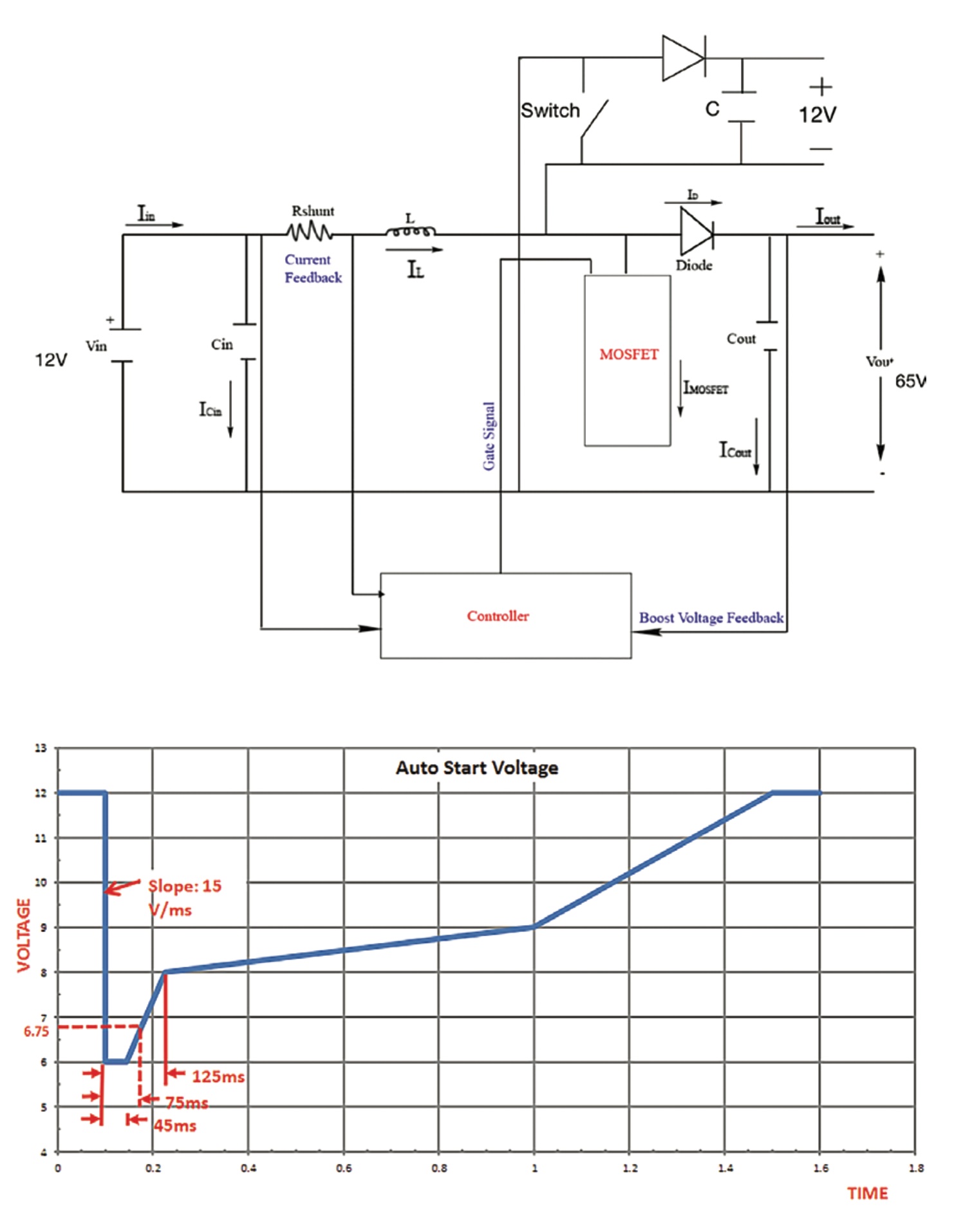
General Motors has tasked our team with finding a smaller, more cost-effective solution to the voltage drop applied to the Electronic Control Units (ECU) during the auto-start feature on automobiles developed by General Motors. This will reduce the cost of producing the electronics in these vehicles. The energy from these boost converters will be repurposed to supply the fuel injectors of the ECU during the auto-start feature.
Auto-Start is a feature of newer automobiles that increases fuel economy and reduces emissions. It is achieved by shutting down portions of the engine, which causes fuel consumption to be reduced significantly. In General Motors automobiles, this is achieved by using multiple external DC/DC converters to ensure that the battery voltage stays above 9.5 Volts (V) during auto-start.
The auto-start feature is designed to turn off the engine while the vehicle is at a complete stop. Currently, once auto-start is triggered, the battery voltage drops to 6V and will stay below 8V for 200 msec. The voltage will not return to the ideal voltage of 12V for 1.5 seconds. The issue with this is that each ECU requires at least 9V for stable operation. The goal of this project is to eliminate these external DC/ DC converters to reduce the overall cost of the vehicle and to increase the lifespan of the ECUs that will be affected.

Michigan State University
Team Members (left to right)
Tim Cholewa
Brighton, Michigan
Jeremy Jarvis
Novi, Michigan
Alec Said
Livonia, Michigan
Sam Lefurgey
Waterford, Michigan
Nicholas Zurlo
Naperville, Illinois
Rebecca Wang
Rochester Hills, Michigan
General Motors
Project Sponsors
S.M. Nayeem Hasan
Warren, Michigan
Project Facilitator
Dr. Woongkul Lee
Great Lakes Crystal Technologies: Thermal Imaging During Diamond Growth
The main objective of this project is to create an environment that can simulate diamond growth. This environment is meant to be like the one located at Great Lakes Crystal Technologies (GLCT). There are numerous components to this environment design, such as an IR camera, quartz bell jar, thermocouple, diamond plate, hot plate, and custom-designed 3D printed pieces. The 3D printed pieces will be curved rectangular shapes with evenly spaced holes. On each piece, the diameters of the circular holes will be different. The first piece will have holes with a diameter of 6 mm, and each subsequent piece’s holes will decrease in diameter by 1 mm down to 3 mm, resulting in a total of four 3D printed pieces. These components will be set up in the configurations shown in the diagrams to the right. Once the simulated environment is set up, it will undergo three experimental tests to provide accurate temperature data of diamond growth. Each experiment’s environment will be set up slightly differently. In the first test, the diamonds’ temperature will be measured with both the IR camera and the thermocouple, and the quartz bell jar will not be used. The second test is nearly identical to the first but with the addition of the quartz bell jar. Finally, the third testing setup will consist of similar aspects of the second testing environment but the thermocouple will be removed. Additionally, the 3D printed pieces will be placed directly in front of the IR camera to study how the IR imaging will be affected by the varying hole diameters of the 3D printed pieces. Moreover, the gathered data from the IR camera’s thermal imaging, light sensitivity readings, and temperature measurements will be processed and analyzed. This project will provide valuable heat distribution data for GLCT to optimize their diamond growth conditions.


Michigan State University
Team Members (left to right)
Dylan Chaben
Rochester, Michigan
Matt Maser
South Lyon, Michigan
Gabriel Molina
Rochester, Michigan
Danyell Morris
Lansing, Michigan
Mohamed Alameeri
Abu Dhabi, United Arab Emirates
Great Lakes Crystal Technologies
Project Sponsors
Paul Quayle
East Lansing, Michigan
Teaching Assistant
Dr. Bei Fan
MSU Department of Electrical & Computer Engineering: Aerial Drone for NDE Applications
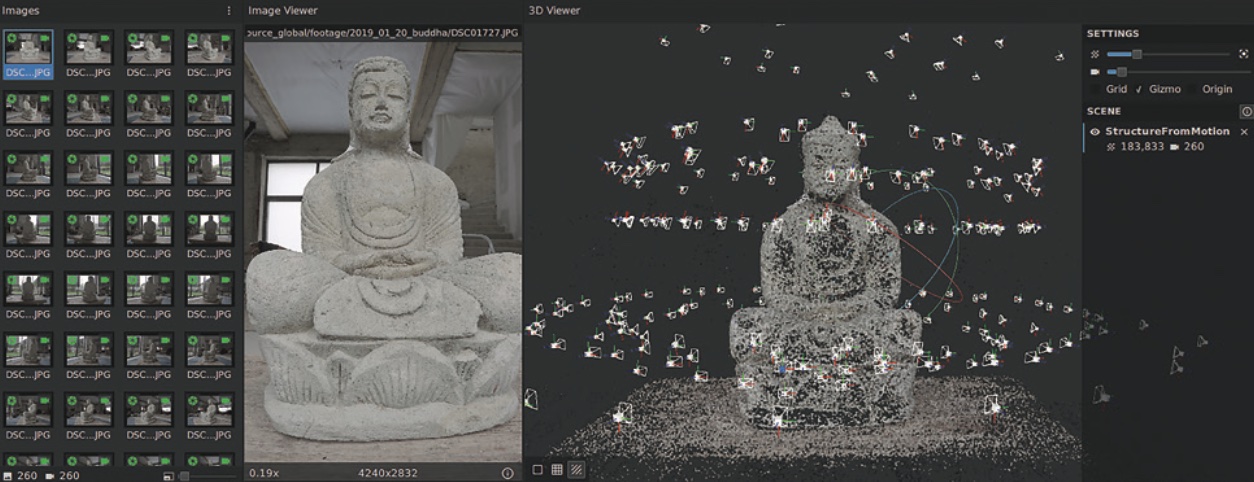
Non-destructive evaluation (NDE) has been used to evaluate the structural integrity of critical structures across many industries. With the help of sensor technology that is selected based on the material and geometry of the structure, NDE techniques detect damage precursors so the appropriate maintenance can be performed to ensure safe and continual operation. Larger structures such as wind turbines, power plants, and building infrastructure can be difficult to scan. That is why we are working on utilizing a drone to capture 2D video which can then be reconstructed into a 3D model using photogrammetry. Photogrammetry is the science of obtaining reliable information about a structure through the process of recording and interpreting 2D photos and videos.
In addition to the stock camera, an RGBD camera will be mounted on the drone to provide two streams of data: RGB video, and depth data. The two data sources are utilized separately to provide a 3D reconstruction of the scanned object. To generate 3D information from RGB video, a photogrammetry approach is being used with the AliceVision framework. To acquire this data from the camera we will be utilizing a Raspberry Pi that will be mounted to the drone. Once the data is obtained, the AliceVision framework will be utilized to reconstruct a 3D image of the structure that was scanned.
In order to mount the new camera and the Raspberry Pi we designed a mount using 3D modeling software, then 3D printed the mount using material that is light and sturdy. This is to ensure that the drone will still be able to fly with the added weight.
Overall, the objective of this project was to obtain an aerial drone and modify it so it can be utilized for NDE applications, such as scanning large structures, to detect any damage precursors that might be presenting themselves.


Michigan State University
Team Members (left to right)
Nilay Platel
Northville, Michigan
Joel John
Okemos, Michigan
Brandon Kushion
Hemlock, Michigan
Suneet Singh
Northville, Michigan
Adilthya Rao
Troy, Michigan
Arpitha Gowda
Troy, Michigan
MSU Department of Electrical & Computer Engineering
Project Sponsors
Ciaron Hamilton
East Lansing, Michigan
Oleksii Karpenko
East Lansing, Michigan
Teaching Assistant
Dr. Peng Zhang
MSU Department of Electrical & Computer Engineering: Detection of Buried Lead Water Pipes
There are many communities, including those based in Michigan, that are facing challenges surrounding the delivery of clean, potable water from legacy infrastructure. Some older lead pipes have experienced leaching into the water system and have caused people to experience health issues. One of the most prominent examples is Flint, Michigan. Lead poisoning has a significant effect on children and can cause weight loss, loss of appetite, and intellectual disabilities. With the Safe Drinking Water setting the standard for water distribution and mandating the phase-out of lead pipes, one might think that it would be a simple matter of digging up and replacing the existing pipes. However, there are many variants of pipes with lead being just one. Many municipalities did not keep extensive records of legacy pipe materials underground. Since the process to replace pipes is very expensive and time-consuming, post-installation mapping is critical. This in itself is an expensive and laborious process.
To that end, the goal of this project is to design and demonstrate an effective method to detect lead water pipes without the need to explicitly excavate them. The design will be robust, safe, and intuitive to non-engineers for easy use. This specific endeavor will pursue the measurement of pipe resistivity to determine its pipe material. Water pipes come in different materials and the resistivity of lead, steel, and copper is substantially different such that it should be possible to distinguish the pipe material from this measurement alone. The four-wire method will be used in tandem with an AC current to measure the voltage drop across the pipe. By using coherent detection techniques, the pipe can be classified without being excavated.


Michigan State University
Team Members (left to right)
Anchen Xue
Suzhou, Jiangsu, China
Bohan Zhou
Chongqing, China
Konnor Kochenderfer
Warren, Michigan
Julia Labaere
Washington, Michigan
Mike Most
Midland, Michigan
Ethan Hopp
Washington, Michigan
MSU Department of Electrical & Computer Engineering
Project Sponsors
Satish Udpa
East Lansing, Michigan
Teaching Assistant
Dr. Robert McGough
MSU Department of Electrical & Computer Engineering: Diaper Monitoring System
Single-use absorbent diapers are commonly used by parents to help keep their babies and young children clean. However, the only way to determine if a diaper has been soiled and needs to be replaced is by manually checking. This can lead to situations where a baby wears a soiled diaper for an extended period of time, such as overnight or when its guardians are away. This is unhygienic for the baby and can lead to rashes or other conditions.
The Diaper Monitoring System uses a smartphone app to notify parents when a diaper needs to be replaced. This increases the effectiveness of diapers by ensuring they do not remain soiled for an extended period. Eliminating this situation reduces occurrences of rashes and increases overall hygiene.
This system utilizes a pair of Ultra-High-Frequency radio- frequency identification (RFID) tags that communicate with an RFID reading device placed in the same room as the baby. One tag acts as a “control” and the other is used to determine if the diaper needs to be changed. When the diaper is clean, both tags are read consistently. However, if the diaper is soiled, one RFID tag does not communicate effectively with the reading device. When this tag is not being read and the “control” tag is present, the system notifies the smartphone application that the diaper needs to be changed. The RFID reading device communicates this information with a Raspberry Pi, which then alerts the phone application over local Wi-Fi.
Consumers of this product will only spend a few cents more per unit compared to traditional diapers because RFID tags are mass- produced for low cost. The Diaper Monitoring System requires users to make a one-time purchase of the RFID reading device and download the smartphone application.


Michigan State University
Team Members (left to right)
Jacob Withers
Edwardsburg, Michigan
Alex Poggi
Farmington Hills, Michigan
Sydney Johnson
Detroit, Michigan
Ryan Tracz
Novi, Michigan
Nicholas Peters
Lake Orion, Michigan
(Not pictured)
Khaled Alneyadi
Dubai, UAE
MSU Department of Electrical & Computer Engineering
Project Sponsors
Satish Udpa
East Lansing, Michigan
Teaching Assistant
Dr. Jeffrey Nanzer
MSU Department of Electrical & Computer Engineering: Miniature Self-Driving Car
Self-driving cars appear to be the future of ground travel. However, many are skeptical about the costs of the sensing technology and control designs of such cars. With good implementation, such cars could avoid many problems that come with human drivers and could reduce collisions making it safer to drive on the road. However, with bad implementation, perception and control of such a vehicle may fail, or even be infeasible due to the cost of supporting and optimizing these platforms.
We are building a 1:10 scale miniature self-driving car in a cost-effective way. We will be using a 1:10 scale miniature car, along with a Raspberry Pi, Lidar, cameras, and a flight controller, as well as other interfacing/sensor devices, to build the final product. For navigation purposes we will be using our cameras to read AprilTags across the indoor environment. We will then fuse our data from the AprilTags with IMU data to provide an accurate localization of our car’s 3D position and orientation. Typically, a GPS would be used in this case, however a GPS system does not work in an indoor environment.
In order for the components of our car to communicate effectively with one another, we have been provided with Python and C++ code which will seamlessly allow our components to operate together.
Successful development of this project will result in an autonomous miniature car that is able to navigate through an indoor environment.



Michigan State University
Team Members (left to right)
Brett Vinton
Sylvan Lake, Michigan
Justin Kuligowski
Saginaw, Michigan
Easton Feinauer
Owosso, Michigan
Ryan Zboril
Fox River Grove, Illinois
Tyler Eiseman
Glen Ellyn, Illinois
Bryan Wang
Troy, Michigan
MSU Department of Electrical & Computer Engineering
Project Sponsors
Vaibhav Srivastava East Lansing, Michigan
Teaching Assistant
Dr. Nihar Mahapatra
MSU Department of Electrical & Computer Engineering: Vocal Enhancement Device
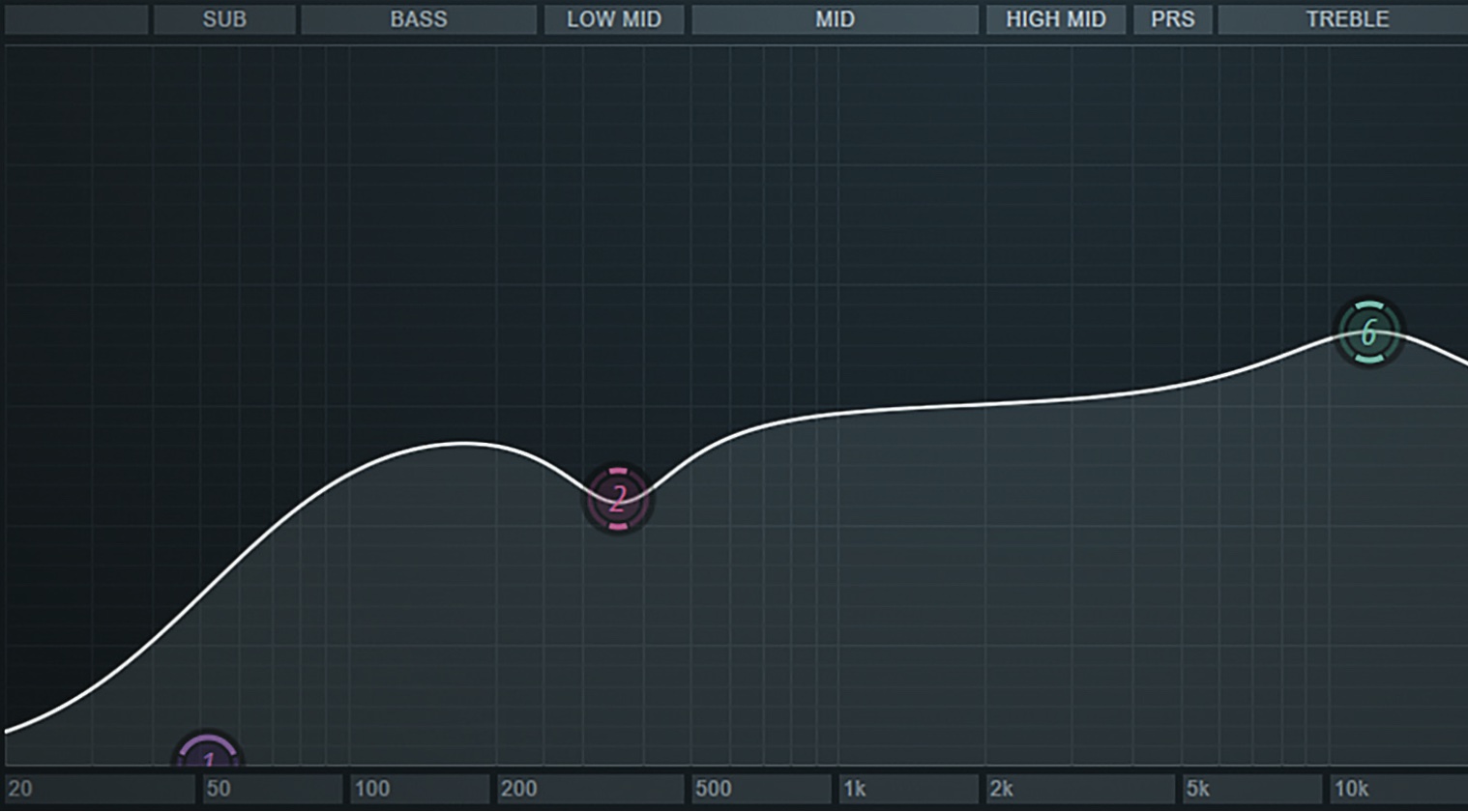
Musical audio engineers use a variety of software modules capable of manipulating sound signals in various ways. These effects are used to improve clarity and quality of vocals. Previously, studios used bulky equipment made from electrical hardware to achieve the same effects.
The proposed project challenges the team to design a compact box with multiple filters to implement these effects. The most important of these filters are a volume gain, an equalizer, a compressor, and a reverb.
The box will be connected between a microphone and speaker and manipulate the input signal before sending the output to the speaker. This project would eliminate the need to pre-record audio before applying the effects. In other words, the proposed device will provide the effects in real time.
Physical constraints include weight, size and cost. The user accessibility of this device would be hindered if the finished design is too heavy to carry or the price is too high. Our objective is to constrain our design to a weight below 15 lbs, a volume less than one cubic foot, and a price under $350.

Michigan State University
Team Members (left to right)
Brady Clifford
East Lansing, Michigan
Nick Fites
Northville, Michigan
Chris Hendrickson
Ann Arbor, Michigan
Gurbir Grewal
Toronto, Ontario
Mike Biscotti
Northville, Michigan
Justin Jones
Troy, Michigan
MSU Department of Electrical & Computer Engineering
Project Sponsors
Teaching Assistant
Dr. Hayder Radha
MSU Department of Electrical & Computer Engineering: Wearable Temperature Monitoring Device
Considering the recent COVID-19 pandemic, monitoring health symptoms in an effective way to reduce the spread of the virus has become a popular topic of discussion. Under current practices, a temperature measurement is required to be taken by a healthcare worker at a relatively close range and, if necessary, periodically rechecked. With current practices, there is the possibility for a healthcare worker to transmit the virus and vice versa. In an ideal world, healthcare workers and patients alike would be able to monitor temperatures while maintaining proper distance. In an attempt to solve this problem, a patient-worn Bluetooth temperature sensing device that can be monitored by a central smart device has been proposed.
The Bluetooth device will generate an accurate temperature reading at five-minute intervals to observe patient temperatures. Comfort and obscurity are paramount in the design of the sensing device, as patient satisfaction is an important goal for healthcare workers. Another important characteristic of the device is cost efficiency as, if implemented, a network of Bluetooth monitors would likely be utilized in order to measure a broad range of patient temperatures.
The wearable device will utilize a high tolerance thermistor to obtain temperature measurements which will communicate with the on-chip analog to digital converter of the selected TI CC2652RB microcontroller. This temperature measurement will be transmitted via Bluetooth Low Energy module on the microcontroller to an Android device. The partnering Android application will display a user-friendly graphical interface that will report patient information, as well as the corresponding temperature measurements.


Michigan State University
Team Members (left to right)
Cora Snyder
Allen Park, Michigan
Ayesha Khan
Canton, Michigan
Alan Smith
DeWitt, Michigan
Rohan Singh
Rochester Hills, Michigan
Blake Behnke
Lapeer, Michigan
Elioenai Vasquez
Immokalee, Florida
MSU Department of Electrical & Computer Engineering
Project Sponsors
Prem Chahal
East Lansing, Michigan
Teaching Assistant
Dr. Jian Ren
MSU Solar Racing Team: Development of Electric Motor Vehicle Controller
The MSU Solar Racing Team is developing an electric vehicle using a new battery pack. This vehicle will require a new customized motor controller that enables the operator to control the motor speed and receive essential motor data. The goal of the project is to design and implement a functional motor controller for the MSU Solar Racing Team’s new electric vehicle. The controller will be able to control two motors through a control loop implemented using instructions on a microcontroller, and receive data from the motors, such as mechanical motor speed, position, temperature, and motor current. The controller will also have Controller Area Network capabilities to relay motor data to the vehicle. The motor circuit can be designed, or alternatively a pre-built design can be implemented.


Michigan State University
Team Members (left to right)
Saad Hasan
Grand Ledge, Michigan
Alyssa Hook
Byron, Michigan
Dan Beaudrie
Cody, Wyoming
Bruno Alejandro
Santa Cruz, Bolivia
Jonathan Schleusener
Dimondale, Michigan
Danny Nowicki
Lansing, Michigan
MSU Solar Racing Team
Project Sponsors
Woongkul Lee
East Lansing, Michigan
Project Facilitator
Dr. Nelson Sepulveda
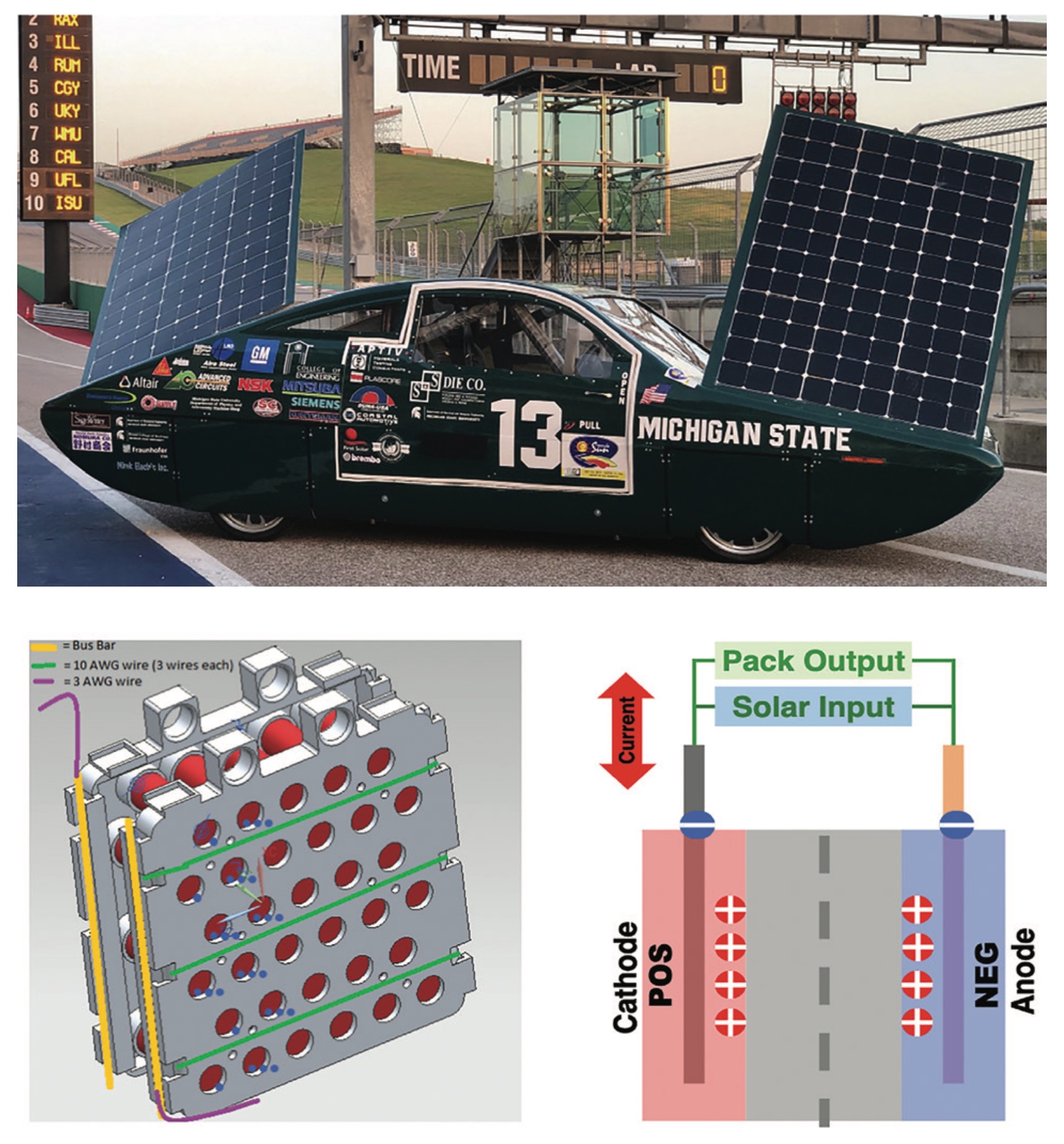
MSU Solar Racing Team: Solar Car Battery Pack
Founded in 2000, the MSU Solar Racing Team is a student- run organization that competitively designs, and races solar- powered electric vehicles. The MSU SRT is planning to design a cruiser class car for participating in the Formula Sun Grand Prix (FSGP) of 2023 and the American Solar Challenge (ASC) of 2024. Our team’s task is to research and build two battery modules for the next challenger class racing car. The Solar Racing Team will build the entire battery pack to be utilized by the car based on the guidelines and data provided by the team.
To evaluate the most viable options for the battery pack, a multitude of battery cells and module materials were researched. Among the many battery cell materials currently available on the market, Lithium-Ion cells were chosen for their high power- to-weight ratio, high energy efficiency, quality high-temperature performance, and low self-discharge rate. The battery cell parameters that are most crucial towards vehicle performance are voltage, current and energy density, which were all considered during battery cell choice.
The battery module frame is crucial for the battery design. Three main problems need to be solved: covering exposed wiring, securing cells more efficiently, and improving air circulation. Previous models used glue to secure cells in the module frame that made it inconvenient to access the batteries. Inclusion of a latch to hold the two ends of the frame provides the ease of accessing the cells within a battery module. Using a lattice design for the frame itself allows for more airflow both in horizontal and vertical direction, as well as using rubber lining for cell holes to allow for more security and to absorb any vibrations.
Ultimately, the module’s design and specifications will facilitate a battery pack with more range, safety, and weight distribution.
Michigan State University
Team Members (left to right)
Pratik Joshi
Troy, Michigan
Victor Huang
Livonia, Michigan
Mohamad Kaafarani
Farmington Hills, Michigan
Abhijit Vyas
Troy, Michigan
Sophia Cibulka
Birmingham, Michigan
Zaid Ramzi
Amman, Jordan
MSU Solar Racing Team
Project Sponsors
Matt Jelcin
East Lansing, Michigan
Woongkul Lee
East Lansing, Michigan
Julia O’Mara
East Lansing, Michigan
Project Facilitator
Dr Nihar Mahapatra
MSU Solar Racing Team: Solar Car Vehicle Dashboard System
The Michigan State University Solar Racing Team (MSU SRT) is a student-led engineering organization that designs, manufactures, and competes with full-sized solar electric vehicles against other colleges. The next car, Cynisca, will compete in the 2024 American Solar Challenge in the challenger class as a single-occupant vehicle.
The goal of this project is to develop an effective dashboard infotainment system (DIS) prototype for the new single-occupant vehicle. The data present on the DIS may include the car’s speed, battery level, battery temperature, solar array current, solar array voltage, and motor characteristics such as speed and torque.
These characteristics were chosen because they give the driver the best idea of the car’s status without flooding them with irrelevant information. With this data, the driver can communicate with the pit crew and determine the best course of action at any point in the race without needing to stop and run diagnostics. This can save time during the race and give the team a competitive edge. This project will help team members gain an advantage over their competitors within the district as they can focus more on other essential electrical components on the vehicle that need development.


Michigan State University
Team Members (left to right)
Johnny Kowynia
Chesterfield, Michigan
Danielle Ostrovsky
West Bloomfield, Michigan
Josiah Bostic
Farmington, Michigan
Matt Jelcin
Sterling Heights, Michigan
Trevor Bonn
Altamonte Springs, Florida
MSU Solar Racing Team
Project Sponsors
Matthew Jelcin
East Lansing, Michigan
Woongkul Lee
East Lansing, Michigan
Julia O’Mara
East Lansing, Michigan
Project Facilitator
Dr. Tim Hogan
NASA: Solar System Communication Network Project
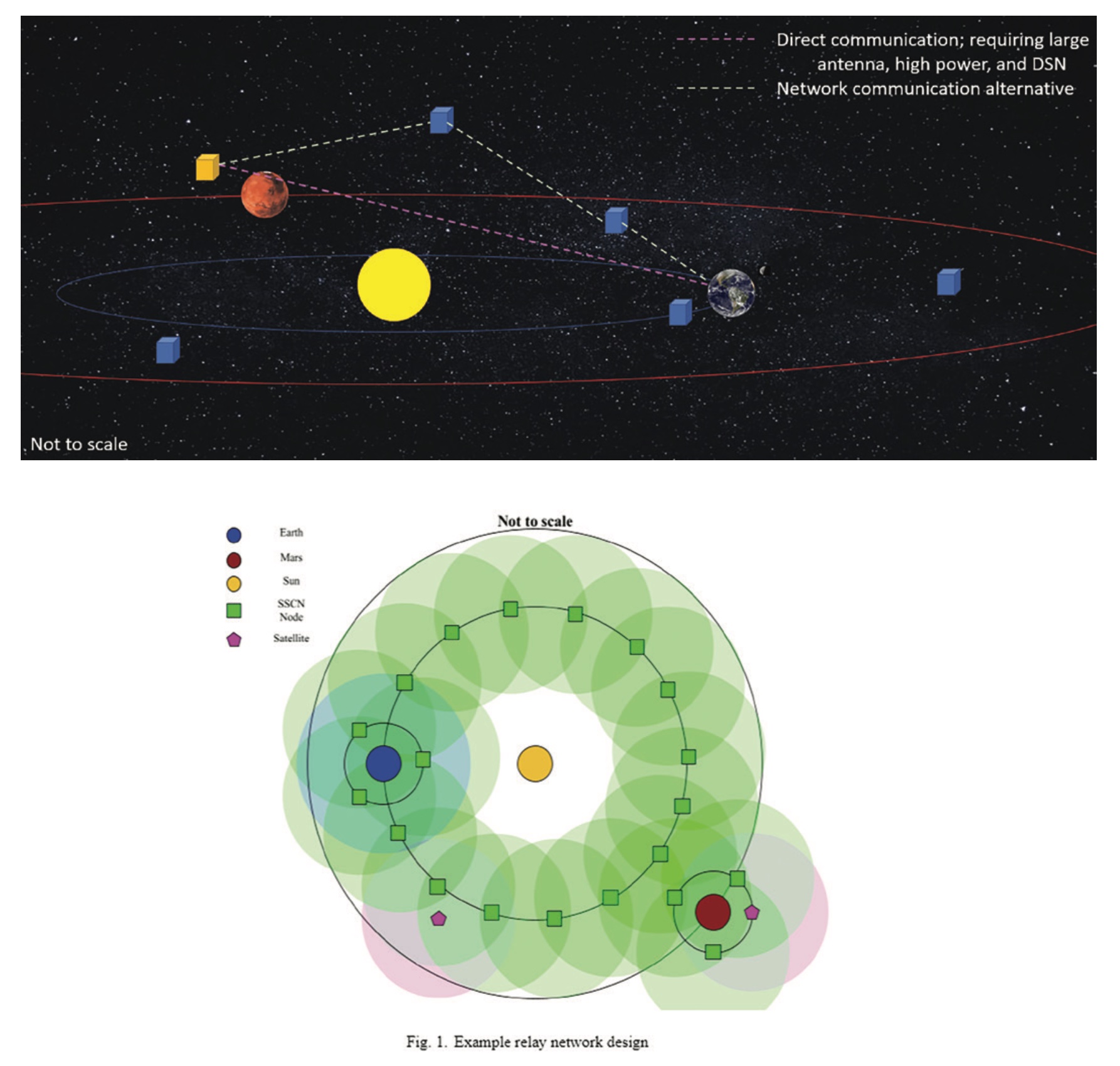
Exploration satellites designed for deep space currently require costly, powerful, and heavy communications equipment. This is due to the nature of the communications problem presented and the current technology available. Presently, deep space communication is based on a direct link between earth and the exploration satellite through NASA’s Deep Space Network (DSN). The DSN is a global array of giant radio antennas designed to communicate with spacecraft exploring the far reaches of the solar system and beyond. The DSN is critical to deep space exploration, and many satellites utilize the DSN. As a result, scheduling time on the DSN is often costly and the network is frequently overwhelmed with requests.
The Solar System Communication Network (SSCN) project, sponsored by NASA, plans to alleviate the load borne by the DSN. The SSCN will consist of many 12U CubeSats designed to relay data in deep space dispersed throughout the inner solar system. The 12U CubeSat would act similar to a cell tower, where satellites would only have to relay information to the closest SSCN satellite instead of creating a direct-to-earth link. This would reduce mass, cost, and power consumption in communication systems of future exploration spacecraft.
Michigan State University
Team Members (left to right)
Robin Onsay
Ann Arbor, Michigan
Yazen Mariya
Troy, Michigan
Reece Reynolds
Port Huron, Michigan
Matthew Maloney
Romeo, Michigan
Parshad Mashar
Toronto, Canada
NASA
Project Sponsors
Eric Eberly
Huntsville, Alabama
Project Facilitator
Dr. Tongtong Li
Texas Instruments: Video and mmWave Radar Data Capture System
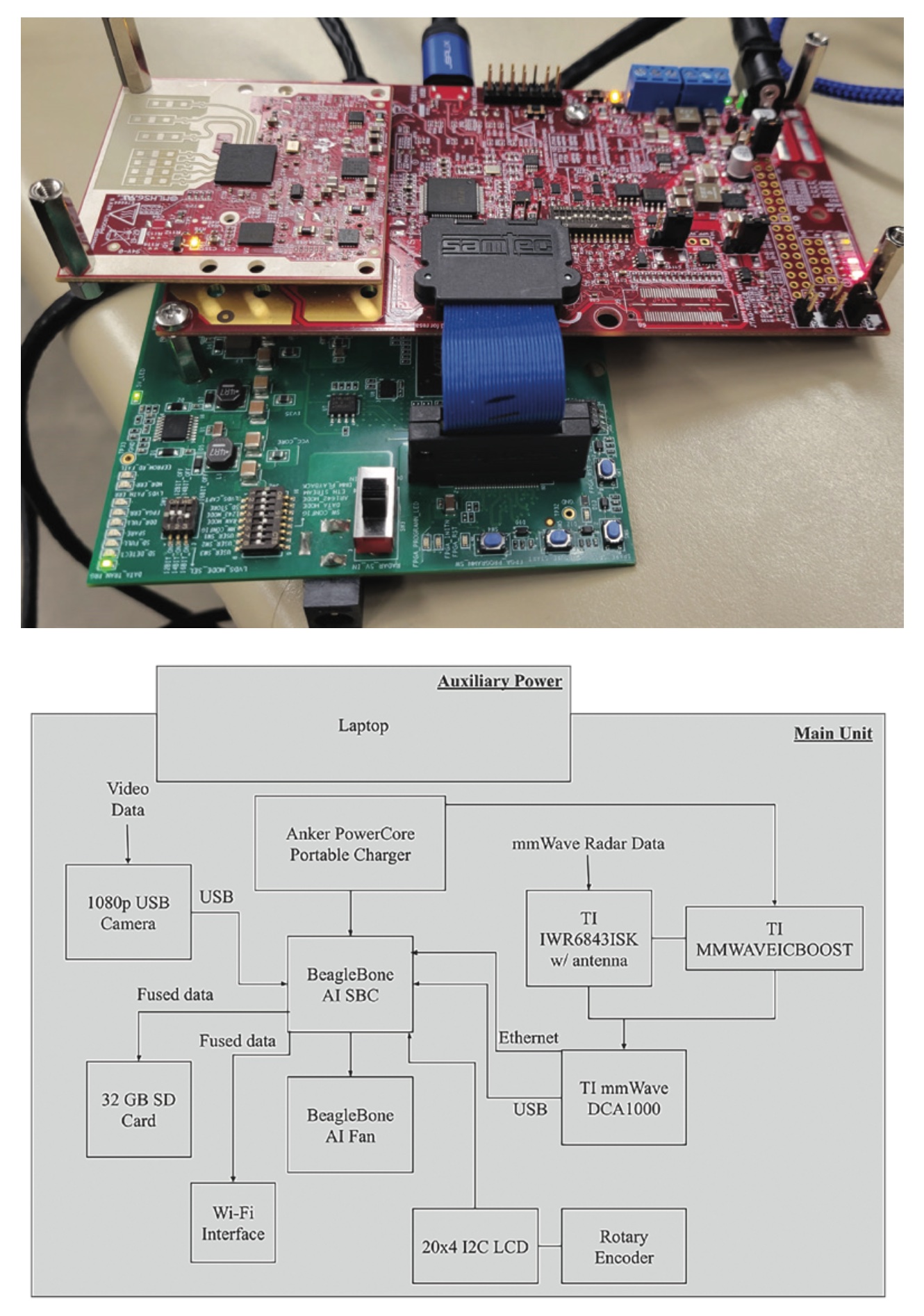
Texas Instruments is a global semiconductor company that, for decades, has made it their mission to foster continuous development and growth by creating affordable products that are smaller, more reliable, and more efficient. With approximately 80,000 products covering a wide range of key markets including industrial, automotive, and personal electronics, TI proves itself year after year to be a trustworthy innovator in all its endeavors.
Notably, Texas Instruments is an industry leader in integrated radio-frequency (RF) complementary metal-oxide semiconductor (CMOS) radar technology with its mmWave radar sensors. These sensors are capable of precisely and accurately measuring an object’s velocity, range, and angle even in complicated environments. This makes industrial sensors, like the IWR6843, ideal for use in multi- leveled data collection systems.
Utilizing this potential, our Video and mmWave Radar Data Capture System was designed to act as a stand-alone mobile system capable of simultaneously capturing video, UART, and mmWave Radar data, fusing them together into a single, intuitive file, and storing large collections of data on an SD card. The next objective of the project was to duplicate the design and create a networking interface for multiple capture systems. Through this interface, multiple systems could exchange software configurations, communicate data, and thereby, accurately classify moving objects within a dynamic environment using machine learning.
By combining the capabilities of the TI hardware boards, their software source development kit, as well as the OpenCV python library, we believe that we were able to develop a meaningful and reproducible design that can act as a framework for future data handling applications.

Michigan State University
Team Members (left to right)
Matt Brauer
Marquette, Michigan
Laxmi Baral
Lansing, Michigan
Aaron Jonckheere
Grand Rapids, Michigan
Chandler Drake
Grand Ledge, Michigan
Sam Reinders
Canton, Michigan
Texas Instruments
Project Sponsors
K. N. Sudharshan
Dallas, Texas
Project Facilitator
Dr. John Papapolymerou